-
1 где-то в диапазоне
Где-то в диапазоне-- Refurbishment of these components may be required at any time within the time frame of 3600 to 14000 hours, depending on the cycle usage of an engine.Русско-английский научно-технический словарь переводчика > где-то в диапазоне
-
2 где-то
Русско-английский научно-технический словарь переводчика > где-то
-
3 диапазон
•The range of accuracy of pneumatic gauges...
•A wide assortment (or variety, or range) of shapes...
•Polymers with a broad spectrum of use...
•Grey iron is an iron-base material within broad composition limits.
•Potential applications of belt conveyors cover the whole gamut of industrial operations.
•Focal-plane shutters may have a range of speeds from several seconds to 1/1250 sec.
* * *Диапазон -- range, spectrum, span; bar (полоса, изображаемая на графиках); latitude (широта, обширность)Русско-английский научно-технический словарь переводчика > диапазон
-
4 линейность
3.10 линейность (linearity): Свойство поведения виброизолятора в динамическом режиме, при котором выполняется принцип суперпозиции.
Примечание 1 - Принцип суперпозиции может быть сформулирован следующим образом: если в двух отдельных экспериментах входному воздействию x1(t) будет соответствовать отклик на выходе y1(t), а входному воздействию x2(t) - отклик y2(t), то считают, что принцип суперпозиции выполнен, если входному воздействию ax1(t) + bx2(t) будет соответствовать отклик ay1(t) + by2(t). Данное условие должно выполняться для любых a, b, х1(t) и x2(t), где a и b - произвольные константы.
Примечание 2 - Прямая проверка выполнения принципа суперпозиции малопригодна с практической точки зрения, поэтому контроль линейности обычно осуществляют, проводя измерения переходной жесткости в некотором диапазоне входных воздействий. Если при заданном предварительном статическом нагружении виброизолятора измеренное значение динамической жесткости не зависит от амплитуды входного возбуждения, то систему можно рассматривать как линейную. По сути, эта процедура является контролем пропорциональности между возбуждением и откликом.
Источник: ГОСТ Р ИСО 10846-1-2010: Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 1. Общие принципы измерений оригинал документа
3.11 линейность (linearity): Свойство поведения виброизолятора в динамическом режиме, при котором выполняется принцип суперпозиции.
Примечание 1 - Принцип суперпозиции может быть сформулирован следующим образом: если в двух отдельных экспериментах входному воздействию x1(t) будет соответствовать отклик на выходе y1(t), а входному воздействию x2(t) - отклик y2(t), то считают, что принцип суперпозиции выполнен, если входному воздействию ax1(t) + bx2(t) будет соответствовать отклик ay1(t) + by2(t). Данное условие должно выполняться для любых a, b, x1(t) и x2(t), где a и b - произвольные константы.
Примечание 2 - Прямая проверка выполнения принципа суперпозиции малопригодна с практической точки зрения, поэтому контроль линейности обычно осуществляют, проводя измерения переходной жесткости в некотором диапазоне входных воздействий. Если при заданном предварительном статическом нагружении виброизолятора измеренное значение динамической жесткости не зависит от амплитуды входного возбуждения, то систему можно рассматривать как линейную. По сути, эта процедура является контролем пропорциональности между возбуждением и откликом (см. 7.7).
Источник: ГОСТ Р ИСО 10846-2-2010: Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 2. Прямой метод определения динамической жесткости упругих опор для поступательной вибрации оригинал документа
3.12 линейность (linearity): Свойство поведения виброизолятора в динамическом режиме, при котором выполняется принцип суперпозиции.
Примечание 1 - Принцип суперпозиции может быть сформулирован следующим образом: если в двух отдельных экспериментах входному воздействию x1(t) будет соответствовать отклик на выходе y1(t), а входному воздействию x2(t) - отклик у2(t), то считают, что принцип суперпозиции выполнен, если входному воздействию ax1(t) + bx2(t) будет соответствовать отклик ay1(t) + by2(t). Данное условие должно выполняться для любых a, b, x1(t) и x2(t), где a и b - произвольные константы.
Примечание 2 - Прямая проверка выполнения принципа суперпозиции малопригодна с практической точки зрения, поэтому контроль линейности обычно осуществляют, проводя измерения переходной жесткости в некотором диапазоне входных воздействий. Если при заданном предварительном статическом нагружении виброизолятора измеренное значение динамической жесткости не зависит от амплитуды входного возбуждения, систему можно рассматривать как линейную. По сути, эта процедура является контролем пропорциональности между возбуждением и откликом (см. 7.7).
Источник: ГОСТ Р ИСО 10846-5-2010: Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 5. Метод входной частотной характеристики для определения переходной динамической жесткости упругих опор в области низких частот для поступательной вибрации оригинал документа
3.12 линейность (linearity): Максимальное отклонение полученного значения массовой концентрации от линейного градуировочного графика.
Источник: ГОСТ Р ИСО 12039-2011: Выбросы стационарных источников. Определение содержания монооксида углерода, диоксида углерода и кислорода. Характеристики и калибровка автоматических измерительных систем в условиях применения оригинал документа
3.11 линейность (linearity): Свойство поведения виброизолятора в динамическом режиме, при котором выполняется принцип суперпозиции.
Примечание 1 - Принцип суперпозиции может быть сформулирован следующим образом: если входному воздействию
 соответствует отклик на выходе
соответствует отклик на выходе  ,а входному воздействию
,а входному воздействию  - отклик
- отклик  ,то считают, что принцип суперпозиции выполнен, если входному воздействию
,то считают, что принцип суперпозиции выполнен, если входному воздействию  будет соответствовать отклик
будет соответствовать отклик  . Данное условие должно выполняться для любых a, β,
. Данное условие должно выполняться для любых a, β,  и
и  ,где a и β - произвольные константы.
,где a и β - произвольные константы.Примечание 2 - Прямая проверка выполнения принципа суперпозиции малопригодна с практической точки зрения, поэтому контроль линейности обычно осуществляют, проводя измерения переходной жесткости в некотором диапазоне входных воздействий. Если при заданном предварительном статическом нагружении виброизолятора измеренное значение динамической жесткости не зависит от амплитуды входного возбуждения, систему можно рассматривать как линейную. По сути, эта процедура является контролем пропорциональности между возбуждением и откликом.
Источник: ГОСТ 31368.3-2008: Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 3. Косвенный метод определения динамической жесткости упругих опор для поступательной вибрации оригинал документа
3.11 линейность (linearity): Свойство поведения упругого элемента в динамическом режиме, при котором выполняется принцип суперпозиции.
Примечание 1 - Принцип суперпозиции может быть сформулирован следующим образом: если входному воздействию x1(t) соответствует отклик на выходе y1(t), а входному воздействию x2(t) - отклик y2(t), то считают, что принцип суперпозиции выполнен, если входному воздействию a · x1(t) + b · x2(t) будет соответствовать отклик a · y1(t) + b · y2(t) - Данное условие должно выполняться для любых a, b, x(t) и x2(t), где a и b - произвольные константы.
Примечание 2 - Прямая проверка выполнения принципа суперпозиции малопригодна с практической точки зрения, поэтому контроль линейности обычно осуществляют, проводя измерения переходной жесткости в некотором диапазоне входных воздействий. По сути эта процедура является контролем пропорциональности между входным возбуждением и откликом (см. 7.7).
Источник: ГОСТ 31368.4-2008: Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 4. Динамическая жесткость неопорных упругих элементов конструкций для поступательной вибрации оригинал документа
Русско-английский словарь нормативно-технической терминологии > линейность
-
5 синхронизация времени
синхронизация времени
-
[ ГОСТ Р МЭК 60870-5-103-2005]Также нормированы допустимые временные задержки для различных видов сигналов, включая дискретные сигналы, оцифрованные мгновенные значения токов и напряжений, сигналы синхронизации времени и т.п.
[Новости Электротехники №4(76) | СТАНДАРТ МЭК 61850]Широковещательное сообщение, как правило, содержит адрес отправителя и глобальный адрес получателя. Примером широковещательного сообщения служит синхронизация времени.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]Устройства последних поколений дают возможность синхронизации времени с точностью до микросекунд с помощью GPS.
С помощью этого интерфейса сигнал синхронизации времени (от радиоприемника DCF77 сигнал точного времени из Braunschweig, либо от радиоприемника iRiG-B сигнал точного времени глобальной спутниковой системы GPS) может быть передан в терминал для точной синхронизации времени.
[Герхард Циглер. ЦИФРОВАЯ ДИСТАНЦИОННАЯ ЗАЩИТА. ПРИНЦИПЫ И ПРИМЕНЕНИЕ
Перевод с английского ]В том случае если принятое сообщение искажено ( повреждено) в результате неисправности канала связи или в результате потери синхронизации времени, пользователь имеет возможность...
2.13 Синхронизация часов реального времени сигналом по оптовходу
В современных системах релейной защиты зачастую требуется синхронизированная работа часов всех реле в системе для восстановления хронологии работы разных реле.
Это может быть выполнено с использованием сигналов синхронизации времени по интерфейсу IRIG-B, если реле оснащено таким входом или сигналом от системы OP
[Дистанционная защита линии MiCOM P443/ ПРИНЦИП РАБОТЫ]
СИНХРОНИЗАЦИЯ ВРЕМЕНИ СОГЛАСНО СТАНДАРТУ IEEE 1588
Автор: Андреас Дреер (Hirschmann Automation and Control)
Вопрос синхронизации устройств по времени важен для многих распределенных систем промышленной автоматизации. При использовании протокола Precision Time Protocol (PTP), описанного стандартом IEEE 1588, становится возможным выполнение синхронизации внутренних часов устройств, объединенных по сети Ethernet, с погрешностями, не превышающими 1 микросекунду. При этом к вычислительной способности устройств и пропускной способности сети предъявляются относительно низкие требования. В 2008 году была утверждена вторая редакция стандарта (IEEE 1588-2008 – PTP версия 2) с рядом внесенных усовершенствований по сравнению с первой его редакцией.
ЗАЧЕМ НЕОБХОДИМА СИНХРОНИЗАЦИЯ УСТРОЙСТВ ПО ВРЕМЕНИ?
Во многих системах должен производиться отсчет времени. О неявной системе отсчета времени можно говорить тогда, когда в системе отсутствуют часы и ход времени определяется процессами, протекающими в аппаратном и программном обеспечении. Этого оказывается достаточно во многих случаях. Неявная система отсчета времени реализуется, к примеру, передачей сигналов, инициирующих начало отсчета времени и затем выполнение определенных действий, от одних устройств другим.
Система отсчета времени считается явной, если показания времени в ней определяются часами. Указанное необходимо для сложных систем. Таким образом, осуществляется разделение процедур передачи данных о времени и данных о процессе.
Два эффекта должны быть учтены при настройке или синхронизации часов в отдельных устройствах. Первое – показания часов в отдельных устройствах изначально отличаются друг от друга (смещение показаний времени друг относительно друга). Второе – реальные часы не производят отсчет времени с одинаковой скоростью. Таким образом, требуется проводить постоянную корректировку хода самых неточных часов.
Существуют различные способы синхронизации часов в составе отдельных устройств, объединенных в одну информационную сеть. Наиболее известные способы – это использование протокола NTP (Network Time Protocol), а также более простого протокола, который образован от него – протокола SNTP (Simple Network Time Protocol). Данные методы широко распространены для использования в локальных сетях и сети Интернет и позволяют обеспечивать синхронизацию времени с погрешностями в диапазоне миллисекунд. Другой вариант – использование радиосигналов с GPS спутников. Однако при использовании данного способа требуется наличие достаточно дорогих GPS-приемников для каждого из устройств, а также GPS-антенн. Данный способ теоретически может обеспечить высокую точность синхронизации времени, однако материальные затраты и трудозатраты обычно препятствуют реализации такого метода синхронизации.
Другим решением является передача высокоточного временного импульса (например, одного импульса в секунду) каждому отдельному устройству по выделенной линии. Реализация данного метода влечет за собой необходимость создания выделенной линии связи к каждому устройству.
Последним методом, который может быть использован, является протокол PTP (Precision Time Protocol), описанный стандартом IEEE 1588. Протокол был разработан со следующими целями:
- Обеспечение синхронизация времени с погрешностью, не превышающей 1 микросекунды.
-
Предъявление минимальных требований к производительности процессоров устройств и к пропускной способности линии связи, что позволило бы обеспечить реализацию протокола в простых и дешевых устройствах.
- Предъявление невысоких требований к обслуживающему персоналу.
- Возможность использования в сетях Ethernet, а также в других сетях.
- Спецификация его как международного стандарта.
ОБЛАСТИ ПРИМЕНЕНИЯ ПРОТОКОЛА PTP
Протокол PTP может быть применен в различного рода системах. В системах автоматизации, протокол PTP востребован везде, где требуется точная синхронизация устройств по времени. Протокол позволяет синхронизировать устройства в робототехнике или печатной промышленности, в системах осуществляющих обработку бумаги и упаковку продукции и других областях.
В общем и целом в любых системах, где осуществляется измерение тех или иных величин и их сравнение с величинами, измеренными другими устройствами, использование протокола PTP является популярным решением. Системы управления турбинами используют протокол PTP для обеспечения более эффективной работы станций. События, происходящие в различных частях распределенных в пространстве систем, определяются метками точного времени и затем для целей архивирования и анализа осуществляется их передача на центры управления. Геоученые используют протокол PTP для синхронизации установок мониторинга сейсмической активности, удаленных друг от друга на значительные расстояния, что предоставляет возможность более точным образом определять эпицентры землетрясений. В области телекоммуникаций рассматривают возможность использования протокола PTP для целей синхронизации сетей и базовых станций. Также синхронизация времени согласно стандарту IEEE 1588 представляет интерес для разработчиков систем обеспечения жизнедеятельности, систем передачи аудио и видео потоков и может быть использована в военной промышленности.
В электроэнергетике протокол PTPv2 (протокол PTP версии 2) определен для синхронизации интеллектуальных электронных устройств (IED) по времени. Например, при реализации шины процесса, с передачей мгновенных значений тока и напряжения согласно стандарту МЭК 61850-9-2, требуется точная синхронизация полевых устройств по времени. Для реализации систем защиты и автоматики с использованием сети Ethernet погрешность синхронизации данных различных устройств по времени должна лежать в микросекундном диапазоне.
Также для реализации функций синхронизированного распределенного векторного измерения электрических величин согласно стандарту IEEE C37.118, учета, оценки качества электрической энергии или анализа аварийных событий необходимо наличие устройств, синхронизированных по времени с максимальной точностью, для чего может быть использован протокол PTP.
Вторая редакция стандарта МЭК 61850 определяет использование в системах синхронизации времени протокола PTP. Детализация профиля протокола PTP для использования на объектах электроэнергетики (IEEE Standard Profile for Use of IEEE 1588 Precision Time Protocol in Power System Applications) в настоящее время осуществляется рабочей группой комитета по релейной защите и автоматике организации (PSRC) IEEE.
В 2005 году была начата работа по изменению стандарта IEEE1588-2002 с целью расширения возможных областей его применения (телекоммуникации, беспроводная связь и в др.). Результатом работы стало новое издание IEEE1588-2008, которое доступно с марта 2008 со следующими новыми особенностями:
- Усовершенствованные алгоритмы для обеспечения погрешностей в наносекундном диапазоне.
- Повышенное быстродействие синхронизации времени (возможна более частая передача сообщений синхронизации Sync).
- Поддержка новых типов сообщений.
- Ввод однорежимного принципа работы (не требуется передачи сообщений типа FollowUp).
- Ввод поддержки функции т.н. прозрачных часов для предотвращения накопления погрешностей измерения при каскадной схеме соединения коммутаторов.
- Ввод профилей, определяющих настройки для новых областей применения.
- Возможность назначения на такие транспортные механизмы как DeviceNet, PROFInet и IEEE802.3/Ethernet (прямое назначение).
- Ввод структуры TLV (тип, длина, значение) для расширения возможных областей применения стандарта и удовлетворения будущих потребностей.
- Ввод дополнительных опциональных расширений стандарта.
ПРИНЦИП ФУНКЦИОНИРОВАНИЯ СИСТЕМ НА ОСНОВЕ ПРОТОКОЛА PTP
В системах, где используется протокол PTP, различают два вида часов: ведущие часы и ведомые часы. Ведущие часы, в идеале, контролируются либо радиочасами, либо GPS-приемниками и осуществляют синхронизацию ведомых часов. Часы в конечном устройстве, неважно ведущие ли они или ведомые, считаются обычными часами; часы в составе устройств сети, выполняющих функцию передачи и маршрутизации данных (например, в Ethernet-коммутаторах), считаются граничными часами.
Процедура синхронизации согласно протоколу PTP подразделяется на два этапа. На первом этапе осуществляется коррекция разницы показаний времени между ведущими и ведомыми часами – то есть осуществляется так называемая коррекция смещения показаний времени. Для этого ведущее устройство осуществляет передачу сообщения для целей синхронизации времени Sync ведомому устройству (сообщение типа Sync). Сообщение содержит в себе текущее показание времени ведущих часов и его передача осуществляется периодически через фиксированные интервалы времени. Однако поскольку считывание показаний ведущих часов, обработка данных и передача через контроллер Ethernet занимает некоторое время, информация в передаваемом сообщении к моменту его приема оказывается неактуальной. Одновременно с этим осуществляется как можно более точная фиксация момента времени, в который сообщение Sync уходит от отправителя, в составе которого находятся ведущие часы (TM1). Затем ведущее устройство осуществляет передачу зафиксированного момента времени передачи сообщения Sync ведомым устройствам (сообщение FollowUp). Те также как можно точнее осуществляют измерение момента времени приема первого сообщения (TS1) и вычисляют величину, на которую необходимо выполнить коррекцию разницы в показаниях времени между собою и ведущим устройством соответственно (O) (см. рис. 1 и рис. 2). Затем непосредственно осуществляется коррекция показаний часов в составе ведомых устройств на величину смещения. Если задержки в передачи сообщений по сети не было, то можно утверждать, что устройства синхронизированы по времени.
На втором этапе процедуры синхронизации устройств по времени осуществляется определение задержки в передаче упомянутых выше сообщений по сети между устройствами. Указанное выполняется при использовании сообщений специального типа. Ведомое устройство отправляет так называемое сообщение Delay Request (Запрос задержки в передаче сообщения по сети) ведущему устройству и осуществляет фиксацию момента передачи данного сообщения. Ведущее устройство фиксирует момент приема данного сообщения и отправляет зафиксированное значение в сообщении Delay Response (Ответное сообщение с указанием момента приема сообщения). Исходя из зафиксированных времен передачи сообщения Delay Request ведомым устройством и приема сообщения Delay Response ведущим устройством производится оценка задержки в передачи сообщения между ними по сети. Затем производится соответствующая коррекция показаний часов в ведомом устройстве. Однако все упомянутое выше справедливо, если характерна симметричная задержка в передаче сообщения в обоих направлениях между устройствами (то есть характерны одинаковые значения в задержке передачи сообщений в обоих направлениях).
Задержка в передачи сообщения в обоих направлениях будет идентичной в том случае, если устройства соединены между собой по одной линии связи и только. Если в сети между устройствами имеются коммутаторы или маршрутизаторы, то симметричной задержка в передачи сообщения между устройствами не будет, поскольку коммутаторы в сети осуществляют сохранение тех пакетов данных, которые проходят через них, и реализуется определенная очередность их передачи. Эта особенность может, в некоторых случаях, значительным образом влиять на величину задержки в передаче сообщений (возможны значительные отличия во временах передачи данных). При низкой информационной загрузке сети этот эффект оказывает малое влияние, однако при высокой информационной загрузке, указанное может значительным образом повлиять на точность синхронизации времени. Для исключения больших погрешностей был предложен специальный метод и введено понятие граничных часов, которые реализуются в составе коммутаторов сети. Данные граничные часы синхронизируются по времени с часами ведущего устройства. Далее коммутатор по каждому порту является ведущим устройством для всех ведомых устройств, подключенных к его портам, в которых осуществляется соответствующая синхронизация часов. Таким образом, синхронизация всегда осуществляется по схеме точка-точка и характерна практически одинаковая задержка в передаче сообщения в прямом и обратном направлении, а также практическая неизменность этой задержки по величине от одной передачи сообщения к другой.
Хотя принцип, основанный на использовании граничных часов показал свою практическую эффективность, другой механизм был определен во второй версии протокола PTPv2 – механизм использования т. н. прозрачных часов. Данный механизм предотвращает накопление погрешности, обусловленной изменением величины задержек в передаче сообщений синхронизации коммутаторами и предотвращает снижение точности синхронизации в случае наличия сети с большим числом каскадно-соединенных коммутаторов. При использовании такого механизма передача сообщений синхронизации осуществляется от ведущего устройства ведомому, как и передача любого другого сообщения в сети. Однако когда сообщение синхронизации проходит через коммутатор фиксируется задержка его передачи коммутатором. Задержка фиксируется в специальном поле коррекции в составе первого сообщения синхронизации Sync или в составе последующего сообщения FollowUp (см. рис. 2). При передаче сообщений Delay Request и Delay Response также осуществляется фиксация времени задержки их в коммутаторе. Таким образом, реализация поддержки т. н. прозрачных часов в составе коммутаторов позволяет компенсировать задержки, возникающие непосредственно в них.
Если необходимо использование протокола PTP в системе, должен быть реализован стек протокола PTP. Это может быть сделано при предъявлении минимальных требований к производительности процессоров устройств и к пропускной способности сети. Это очень важно для реализации стека протокола в простых и дешевых устройствах. Протокол PTP может быть без труда реализован даже в системах, построенных на дешевых контроллерах (32 бита).
Единственное требование, которое необходимо удовлетворить для обеспечения высокой точности синхронизации, – как можно более точное измерение устройствами момента времени, в который осуществляется передача сообщения, и момента времени, когда осуществляется прием сообщения. Измерение должно производится максимально близко к аппаратной части (например, непосредственно в драйвере) и с максимально возможной точностью. В реализациях исключительно на программном уровне архитектура и производительность системы непосредственно ограничивают максимально допустимую точность.
При использовании дополнительной поддержки аппаратного обеспечения для присвоения меток времени, точность может быть значительным образом повышена и может быть обеспечена ее виртуальная независимость от программного обеспечения. Для этого необходимо использование дополнительной логики, которая может быть реализована в программируемой логической интегральной схеме или специализированной для решения конкретной задачи интегральной схеме на сетевом входе.
Компания Hirschmann – один из первых производителей, реализовавших протокол PTP и оптимизировавших его использование. Компанией был разработан стек, максимально эффективно реализующий протокол, а также чип (программируемая интегральная логическая схема), который обеспечивает высокую точность проводимых замеров.
В системе, в которой несколько обычных часов объединены через Ethernet-коммутатор с функцией граничных часов, была достигнута предельная погрешность +/- 60 нс при практически полной независимости от загрузки сети и загрузки процессора. Также компанией была протестирована система, состоящая из 30 каскадно-соединенных коммутаторов, обладающих функцией поддержки т.н. прозрачных часов и были зафиксированы погрешности менее в пределах +/- 200 нс.
Компания Hirschmann Automation and Control реализовала протоколы PTP версии 1 и версии 2 в промышленных коммутаторах серии MICE, а также в серии монтируемых на стойку коммутаторов MACH100.
Протокол PTP во многих областях уже доказал эффективность своего применения. Можно быть уверенным, что он получит более широкое распространение в течение следующих лет и что многие решения при его использовании смогут быть реализованы более просто и эффективно чем при использовании других технологий.
[ Источник]
Тематики
- релейная защита
- телемеханика, телеметрия
EN
Русско-английский словарь нормативно-технической терминологии > синхронизация времени
-
6 оптическое излучение
оптическое излучение
свет
Электромагнитное излучение с длинами волн, расположенными в диапазоне от 0,1 А до 1 см (оптическом диапазоне).
Примечание. Указанные границы диапазонов длин волн условны, а сами длины волн даны для вакуума.
[Сборник рекомендуемых терминов. Выпуск 79. Физическая оптика. Академия наук СССР. Комитет научно-технической терминологии. 1970 г.]
оптическое излучение
Электромагнитное излучение (фотоны) с длинами волн от 1 нм до 1 мм.
Примечание
Оптическое излучение состоит из:
а) переходной области рентгеновского излучения (диапазон длин волн от 1 до 100 нм);
б) ультрафиолетового излучения (диапазон длин волн от 100 до 400 нм, в том числе УФ-А - от 315 до 400 нм, УФ-В - от 280 до 315 нм, УФ-С - от 100 до 280 нм; иногда область от 100 до 200 нм обозначают как область вакуумного ультрафиолета - ВУФ);
в) видимого излучения света (диапазон длин волн от 380-400 до 760-780 нм);
г) инфракрасного излучения (диапазон длин волн от 780 нм до 1 мм, в том числе ИК-А - от 780 до 1400 нм, ИК-В - от 1,4 до 3 мкм, ИК-С - от 3 мкм до 1 мм).
[ ГОСТ 25645.321-87]
оптическое излучение
Электромагнитное излучение, характеризующееся длинами волн, расположенными в диапазоне 5•10-9-10-3 м.
Примечание
В указанном диапазоне электромагнитные волны наиболее эффективно изучаются оптическими методами, для которых характерно формирование направленных потоков электромагнитных волн с помощью оптических систем
[ ГОСТ 21934-83]
оптическое излучение
Электромагнитное излучение с длинами волн примерно от 1 нм до 1 мм.
Примечание
Оптическая область спектра делится на ультрафиолетовую, видимую и инфракрасную.
[Система неразрушающего контроля. Виды (методы) и технология неразрушающего контроля. Термины и определения (справочное пособие). Москва 2003 г.]Тематики
- приемники излуч. полупроводн. и фотоприемн. устр.
- физическая оптика
Синонимы
EN
DE
3.26 оптическое излучение (optical radiation): Электромагнитное излучение на длинах волн между 100 нм и 1 мм. Ультрафиолетовое излучение в области длин волн меньше 180 нм (называемое вакуумным УФ) полностью поглощается кислородом воздуха. В этом стандарте диапазон длин волн оптического излучения ограничен с меньшей стороны излучением с длиной волн 180 нм.
Примечание - Принимая во внимание безопасность излучения, спектральный диапазон между 380 и 1400 нм нуждается в специальном рассмотрении, так как глаз пропускает излучение в этом спектральном диапазоне на сетчатку, где оно фокусируется, энергетическая освещенность может быть увеличена в несколько раз по абсолютному значению по сравнению с освещенностью роговой оболочки глаза.
3.5.4 оптическое излучение (optical radiation): Электромагнитное излучение, длина волны которого находится в интервале от 10 нм до 1 мм.
Примечание - К оптическому излучению относятся ультрафиолетовое, видимое и инфракрасное излучения.
Источник: ГОСТ Р 52350.29.4-2011: Взрывоопасные среды. Часть 29-4. Газоанализаторы. Общие технические требования и методы испытаний газоанализаторов горючих газов с открытым оптическим каналом оригинал документа
Русско-английский словарь нормативно-технической терминологии > оптическое излучение
-
7 граничная частота коэффициента передачи тока
граничная частота коэффициента передачи тока
Частота, при которой модуль коэффициента передачи тока в схеме с общим эмиттером экстраполируется к единице.
Обозначение
fгр
ft
Примечание
Частота, равная произведению модуля коэффициента передачи тока на частоту измерения, которая находится в диапазоне частот, где справедлив закон изменения модуля коэффициента передачи тока 6 дБ на октаву.
[ ГОСТ 20003-74]Тематики
EN
DE
FR
30. Граничная частота коэффициента передачи тока
D. Übergangsfrequenz der Stromverstärkung (Transitfrequenz)
E. Transition frequency
F. Fréquence de transition
fгр
Частота, при которой модуль коэффициента передачи тока в схеме с общим эмиттером экстраполируется к единице.
Примечание. Частота, равная произведению модуля коэффициента передачи тока на частоту измерения, которая находится в диапазоне частот, где справедлив закон изменения модуля коэффициента передачи тока 6 дБ на октаву
Источник: ГОСТ 20003-74: Транзисторы биполярные. Термины, определения и буквенные обозначения параметров оригинал документа
Русско-немецкий словарь нормативно-технической терминологии > граничная частота коэффициента передачи тока
-
8 воздухораспределитель
- supply air outlet
- luminaire
- air terminal unit
- air terminal device
- air outlet
- air distributor
- air dispenser
- air diffuser
воздухораспределитель
Концевой элемент для выпуска или отвода в обслуживаемое помещение требуемого количества воздуха.
Примечания:
1. Виды воздухораспределителей по конструктивному признаку:
- решетка,
- насадок,
- перфорированная панель.
2. По месту установки воздухораспределители могут быть:
- потолочные,
- пристенные,
- напольные.
3. По характеру организации приточной струи воздухораспределители могут быть:
- с подачей компактной струи,
- с подачей неполной веерной струи,
- с подачей полной веерной струи,
- с подачей плоской струи,
- с двухструйной подачей.
[ ГОСТ 22270-76]
Воздухораспределение в помещениях: классификация системВоздухораспределение является одной из самых сложных задач, которая, по существу, определяет конечный, потребительский эффект работы вентиляции и кондиционирования воздуха. Как подать воздух в помещение, чтобы избежать сквозняков и застойных зон, обеспечить равномерное распределение температуры воздуха в рабочей (обслуживаемой) зоне, не допустить перетопов, избыточного охлаждения и вентилирования помещения, загрязнения «чистых» зон вредными выделениями «грязных»? Все эти вопросы рассматриваются при выборе схемы организации воздухообмена и типа воздухораспределителей, непосредственно подающих воздух в помещение.
Сегодня мы публикуем обзор различных технологий вентиляции (схем организации воздухообмена) и видов воздухораспределителей.
Воздухораспределители являются важнейшими элементами систем кондиционирования воздуха и вентиляции. Однако выбор систем воздухораспределения является достаточно сложной задачей и требует знания всех разработок в этой области.Задача воздухораспределителей состоит в обеспечении равномерного распределения воздуха в помещении с целью:
• ассимиляции тепловой нагрузки, как положительной, так и отрицательной;
• ассимиляции взвешенной в воздухе мельчайшей пыли и удаление ее вытяжной системой;
• поддержания в помещении заданной минимальной неравномерности температуры и скорости движения воздуха (градиента температуры и скорости в пределах установленного диапазона по вертикали и горизонтали).При проектировании систем воздухораспределения следует учитывать фактические особенности помещения, которые могут влиять на распространение (циркуляцию) воздуха:
• наличие препятствий на пути движения воздушных струй;
• наличие локальных интенсивных тепловых источников;
• изменения температуры и/или расхода воздуха (например, в системах с переменным расходом) в приточных струях, влияющие на их дальнобойность.При выборе типа и размера воздухораспределителей (ВР) не следует забывать о том, что любой из них является источником шума в обслуживаемом помещении. Уровень шума ВР, выражаемый в Дб(А), составляет обычно от 25 до 35 единиц. В любом случае после монтажа оборудования следует самым тщательным образом измерить фактические параметры создаваемого ВР шума. Кроме того, необходимо также определить параметры потери нагрузки – в зависимости от значений объемного расхода воздуха они варьируются в диапазоне от 5 до 35 Па.
Схемы организации воздухообмена в помещении определяются параметрами системы кондиционирования, аэрогидродинамическими характеристиками приточных и вытяжных устройств, их расположением в обслуживаемом помещении, которое часто обусловлено архитектурными решениями.
Воздухораспределители можно классифицировать по схемам организации воздухообмена, которые в свою очередь делятся на две основные группы: перемешивающие и вытесняющие.
Перемешивающие системы вентиляции
Перемешивающую вентиляцию называют еще «распределением воздуха посредством турбулентного потока». Это наиболее популярная система распределения воздуха. Она организуется при помощи ВР, подающих воздух в помещение воздушными струями, имеющими высокую скорость и турбулентность, вызывающими интенсивную циркуляцию воздуха. В результате происходит перемешивание свежего воздуха приточной струи с воздухом помещения. Если происходит полное перемешивание, на определенном расстоянии от места притока параметры воздуха (температура, относительная влажность, скорость движения), а также содержание загрязняющих веществ будут одинаковыми в любой точке обслуживаемого помещения. Объемный расход приточного воздуха, как правило, невелик по сравнению с общей перемещаемой массой воздуха в помещении. Начальная скорость приточной струи может изменяться в зависимости от конкретных условий в очень широком диапазоне – от 2 до 20 м/с. Разность температур между приточным воздухом и воздухом в помещении также может быть достаточно высокой как в режиме отопления, так и в режиме охлаждения помещения. Температура воздуха будет практически одинаковой там, где обеспечивается достаточно интенсивное перемешивание воздуха, и, напротив, в застойных зонах могут иметь место значительные температурные перепады. Следует отметить, что на наличие и размеры застойных зон, помимо приточных струй, оказывают влияние естественные конвективные потоки, формируемые в конкретном помещении. Формирование конвективных потоков и их характеристик определяется множеством факторов, таких, в частности, как наличие локальных источников тепла, их мощность, размеры и расположение в помещении, теплоизоляция ограждений помещения и т. п. Отметим, что критичными представляются случаи, когда застойные зоны образуются в рабочей (обслуживаемой) зоне помещения; менее критичны ситуации, когда застойные зоны расположены за пределами рабочей зоны, например, в верхней зоне помещения. Наличие в помещении застойных зон, независимо от вида используемого ВР, более неприятно при отопительном режиме работы вентиляции, в силу естественной тенденции нагретого воздуха перемещаться вверх за пределы рабочей зоны.
Размеры застойных зон можно уменьшить путем соответствующего увеличения объемного расхода и скорости приточного воздуха. Эта, на первый взгляд, банальная операция не должна нарушать комфорт пользователей, находящихся на рабочем участке. В этом смысле довольно проблематичным представляется использование перемешивающих систем с напольным распределением воздуха, когда из-за высокой скорости движения воздуха в обслуживаемой зоне могут возникать условия ощутимого дискомфорта. Если же условия комфорта не являются обязательными (например, на участках, где не предусмотрено постоянное присутствие людей), то явление температурного расслоения воздуха по высоте может позволить снизить холодильную нагрузку.
Виды ВР для перемешивающих систем воздухораспределения приведены в табл. 1. Классификация ВР, представленная в табл. 1, не претендует на то, чтобы быть исчерпывающей.
Таблица 1
Виды воздухораспределителей для перемешивающей вентиляцииВид
Подвиды
Приточные решетки
- для установки в стене или воздуховоде
- с одним или двумя рядами лопаток
- с неподвижными горизонтальными лопаткамиПотолочные ВР (плафоны)
- многодиффузорные круглые
- многодиффузорные квадратные (прямоугольные) с различными направлениями приточных струй (секторные кольцевые, с перфорированной крышкой и т. п.)ВР, формирующие быстро
затухающие струи- щелевые, устанавливаемые в потолке или стене
- квадратные или круглые, устанавливаемые в потолке
- с регулируемыми элементами (стенные, потолочные)
- с перфорированной элементами, устанавливаемые в потолке или стенеВР, формирующие закрученные струи
- круглые или квадратные с неподвижными или регулируемыми закручивателями
- щелевые, устанавливаемые в стенеВР с регулируемой геометрией
- с регулируемыми лопатками
- с неподвижными лопатками и с регулируемым «цилиндром», двухструйныеСопловые ВР
- с шаровой или полусферической камерой
- с воздухораздающими элементами-закручивателями
- с рядом воздухораздающих элементовВР напольные
- круглые, с закрученным воздушным потоком
- кресельные
- напольные и лестничные решеткиСм. также:
- приточные решетки
- вытяжные решетки
- потолочные воздухораспределители (плафоны)
- многодиффузорные плафоны
- эффект Коанда
- щелевые воздухораспределители
- щелевые потолочные воздухораспредели
- щелевые воздухораспределители, встраиваемые в стены
- индивидуальное кондиционирование
- воздухораспределители с регулируемыми насадками
- воздухораспределители с перфорированной крышкой
- воздухораспределители, формирующие быстро затухающие струи
- воздухораспределители, формирующие закрученную струю
- воздухораспределители с изменяемой геометрией
- воздухораспределитель с системой термостатического управления
- сопловые воздухораспределители
- воздухораспределители для вытесняющей вентиляции
Перевод с итальянского С. Н. Булекова.
Научное редактирование выполнено вице-президентом НП «АВОК» Е. О. Шилькротом и В. Н. Посохиным, заведующим кафедрой ТГВ Казанского государственного архитектурно-строительного университета (КГАСУ)
[ http://www.abok.ru/for_spec/articles.php?nid=4280]Тематики
Обобщающие термины
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > воздухораспределитель
9 граничная частота коэффициента передачи тока
граничная частота коэффициента передачи тока
Частота, при которой модуль коэффициента передачи тока в схеме с общим эмиттером экстраполируется к единице.
Обозначение
fгр
ft
Примечание
Частота, равная произведению модуля коэффициента передачи тока на частоту измерения, которая находится в диапазоне частот, где справедлив закон изменения модуля коэффициента передачи тока 6 дБ на октаву.
[ ГОСТ 20003-74]Тематики
EN
DE
FR
30. Граничная частота коэффициента передачи тока
D. Übergangsfrequenz der Stromverstärkung (Transitfrequenz)
E. Transition frequency
F. Fréquence de transition
fгр
Частота, при которой модуль коэффициента передачи тока в схеме с общим эмиттером экстраполируется к единице.
Примечание. Частота, равная произведению модуля коэффициента передачи тока на частоту измерения, которая находится в диапазоне частот, где справедлив закон изменения модуля коэффициента передачи тока 6 дБ на октаву
Источник: ГОСТ 20003-74: Транзисторы биполярные. Термины, определения и буквенные обозначения параметров оригинал документа
Русско-английский словарь нормативно-технической терминологии > граничная частота коэффициента передачи тока
10 коэффициент потерь упругого элемента
3.6 коэффициент потерь упругого элемента (loss factor of resilient element) h:Величина, представляющая собой отношение мнимой и действительной частей
 (т.е. тангенс фазового угла
(т.е. тангенс фазового угла  ) в диапазоне низких частот, где влияние инерционных сил в упругом элементе незначительно.
) в диапазоне низких частот, где влияние инерционных сил в упругом элементе незначительно.Источник: ГОСТ 31368.3-2008: Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 3. Косвенный метод определения динамической жесткости упругих опор для поступательной вибрации оригинал документа
3.6 коэффициент потерь упругого элемента (loss factor of resilient element) η: Величина, представляющая собой отношение мнимой и действительной частей k2,1 - (т.е. тангенс фазового угла k2,1) в диапазоне низких частот, где влияние инерционных сил в упругом элементе незначительно.
Источник: ГОСТ 31368.4-2008: Вибрация. Измерения виброакустических передаточных характеристик упругих элементов конструкций в лабораторных условиях. Часть 4. Динамическая жесткость неопорных упругих элементов конструкций для поступательной вибрации оригинал документа
Русско-английский словарь нормативно-технической терминологии > коэффициент потерь упругого элемента
11 граничная частота коэффициента передачи тока
граничная частота коэффициента передачи тока
Частота, при которой модуль коэффициента передачи тока в схеме с общим эмиттером экстраполируется к единице.
Обозначение
fгр
ft
Примечание
Частота, равная произведению модуля коэффициента передачи тока на частоту измерения, которая находится в диапазоне частот, где справедлив закон изменения модуля коэффициента передачи тока 6 дБ на октаву.
[ ГОСТ 20003-74]Тематики
EN
DE
FR
30. Граничная частота коэффициента передачи тока
D. Übergangsfrequenz der Stromverstärkung (Transitfrequenz)
E. Transition frequency
F. Fréquence de transition
fгр
Частота, при которой модуль коэффициента передачи тока в схеме с общим эмиттером экстраполируется к единице.
Примечание. Частота, равная произведению модуля коэффициента передачи тока на частоту измерения, которая находится в диапазоне частот, где справедлив закон изменения модуля коэффициента передачи тока 6 дБ на октаву
Источник: ГОСТ 20003-74: Транзисторы биполярные. Термины, определения и буквенные обозначения параметров оригинал документа
Русско-французский словарь нормативно-технической терминологии > граничная частота коэффициента передачи тока
12 Спектральный метод определения никеля, алюминия, магния, марганца, кобальта, олова, меди и циркония в ниобии
4.2. Спектральный метод определения никеля, алюминия, магния, марганца, кобальта, олова, меди и циркония в ниобии
Спектральному методу предшествует перевод анализируемой пробы в пятиокись ниобия.
Метод основан на измерении интенсивности линий элементов примесей в спектре, полученном при испарении пятиокиси ниобия в смеси с графитовым порошком и хлористым натрием из канала графитового электрода в дуге постоянного тока.
Массовую долю примесей в ниобии (табл. 4) определяют по градуировочным графикам, построенным в координатах: логарифм отношения интенсивности линии определяемого элемента и интенсивности фона (
 ) - логарифм концентрации определяемого элемента (lg C).
) - логарифм концентрации определяемого элемента (lg C).4.2.1. Аппаратура, материалы и реактивы
Спектрограф дифракционный типа ДФС-13 с решеткой 600 и 1200 штр/мм и трехлинзовой системой освещения щели или аналогичный прибор (фотоэлектрический прибор типа МФС). Допускается использовать спектрограф ДФС-8 с решеткой 1800 штрихов.
Генератор дуговой типа ДГ-2 с дополнительным реостатом или генератор аналогичного типа.
Выпрямитель 250 - 300 В, 30 - 50 А.
Микрофотометр нерегистрирующий типа МФ-2 или аналогичного типа.
Таблица 4
Определяемая примесь
Массовая доля примеси, %
Никель
1∙10-3 - 2∙10-2
Алюминий
5∙10-4 - 1∙10-2
Магний
1∙10-3 - 2∙10-3
Марганец
5∙10-4 - 5∙10-3
Кобальт
5∙10-4 - 3∙10-2
Олово
1∙10-3 - 1∙10-2
Медь
3∙10-3 - 5∙10-2
Цирконий
1∙10-3 - 2∙10-2
Спектропроектор типа ПС-18, СП-2 или аналогичного типа.
Весы аналитические.
Весы торсионные типа ВТ-500.
Ступка и пестик из органического стекла.
Бокс из органического стекла.
Электропечь муфельная с терморегулятором на температуру до 900 °С.
Чашки платиновые.
Станок для заточки графитовых электродов.
Электроды графитовые, выточенные из графитовых стержней ОС. Ч. 7 - 3 диаметром 6 мм, заточенные на усеченный конус с площадкой диаметром 1,5 мм.
Электроды графитовые, выточенные из графитовых стержней ОС. Ч. 7 - 3 диаметром 6 мм, с каналом глубиной 5 мм, внешний диаметр - 3,0 мм, внутренний диаметр - 2,0 мм, длина заточенной части - 6 мм.
Порошок графитовый ОС. Ч. 8 - 4 по ГОСТ 23463-79.
Фотопластинки спектрографические марок СПЭС и СП-2, размером 9´12/1,2 или 13´18/1,2, обеспечивающие нормальное почернение аналитических линий и близлежащего фона в спектре.
Лампа инфракрасная ИКЗ-500 с регулятором напряжения РНО-250-0,5 или аналогичным.
Спирт этиловый ректификованный по ГОСТ 18300-72, дважды перегнанный в кварцевом приборе.
Никеля окись черная по ГОСТ 4331-78, ч.
Алюминия окись безводная для спектрального анализа, х. ч.
Магния окись по ГОСТ 4526-75, ч. д. а.
Марганца (IV) окись по ГОСТ 4470-79, ч. д. а.
Кобальта (II - III) окись по ГОСТ 4467-79, ч. или ч. д. а.
Олова двуокись, ч. д. а.
Циркония двуокись по ГОСТ 21907-76.
Меди (II) окись по ГОСТ 16539-79.
Натрий хлористый ОС. Ч. 6 - 1.
Ниобия пятиокись, в которой содержание определяемых элементов не превышает установленной для метода нижней границы диапазона определяемых массовых долей.
Проявитель:
метол........................................................................................ 2,2 г
натрий сернистокислый безводный по ГОСТ 195-77......... 96 г
гидрохинон по ГОСТ 19627-74............................................. 8,8 г
натрий углекислый по ГОСТ 83-79...................................... 48 г
калий бромистый по ГОСТ 4160-74..................................... 5 г
вода........................................................................................... до 1000 см3.
Фиксаж:
тиосульфат натрия кристаллический по СТ СЭВ 223-75... 300 г
аммоний хлористый по ГОСТ 3773-72................................ 20 г
вода........................................................................................... до 1000 см3.
4.2.2. Приготовление буферной смеси
Буферную смесь, состоящую из 90 % угольного порошка и 10 % хлористого натрия готовят, смешивая 0,9000 г угольного порошка и 0,1000 г хлористого натрия с 20 см3 спирта в течение 30 мин и высушивая под инфракрасной лампой.
4.2.3. Приготовление образцов сравнения (ОС)
Основной образец сравнения, содержащий по 1 % никеля, алюминия, магния, марганца, кобальта, олова, циркония и меди, готовят механическим истиранием и перемешиванием буферной смеси с окислами соответствующих металлов.
Навески массой 0,0141 г окиси никеля, 0,0189 г окиси алюминия, 0,0186 г окиси магния, 0,0158 г окиси марганца (IV) 0,0136 г (II - III)-окиси кобальта, 0,0127 г двуокиси олова, 0,0125 г окиси меди и 0,0140 г двуокиси циркония помещают в ступке из органического стекла и добавляют 0,8818 г буферной смеси. Смесь тщательно перемешивают, добавляя спирт для поддержания смеси в кашицеобразном состоянии, в течение 1 ч и высушивают под инфракрасной лампой до постоянной массы.
Последовательным разбавлением основного образца сравнения буферной смесью готовят серию образцов сравнения (ОС) с убывающей концентрацией определяемых элементов. Содержание каждой из определяемых примесей (в процентах на содержание металла в металлическом ниобии) и вводимые в смесь навески буферной смеси и разбавляемого образца приведены в табл. 5.
Образцы сравнения хранят в полиэтиленовых банках с крышками.
Таблица 5
Обозначение образца
Массовая доля каждой из определяемых примесей, %
Масса навески, г
буферной смеси
разбавляемого образца
ОС 1
1∙10-1
3,3930
0,3770 (основной образец)
ОС 2
5∙10-2
1,7700
1,7700 (ОС 1)
ОС 3
2∙10-2
2,3100
1,5400 (ОС 2)
ОС 4
1∙10-2
1,8500
1,8500 (ОС 3)
ОС 5
5∙10-3
1,7000
1,7000 (ОС 4)
ОС 6
2∙10-3
2,1000
1,4000 (ОС 5)
ОС 7
1∙10-3
1,5000
1,5000 (ОС 6)
ОС 8
5∙10-4
1,0000
1,0000 (ОС 7)
4.1.2 - 4.2.3. (Измененная редакция, Изм. № 1).
4.2.4. Проведение анализа
4.2.4.1. Перевод металлического ниобия в пятиокись ниобия
Пробу металлического ниобия 1 - 3 г помещают в платиновую чашку и прокаливают в муфельной печи при температуре 800 - 900 °С в течение 2 ч. Полученную пятиокись ниобия в виде белого порошка охлаждают в эксикаторе, помещают в пакет из кальки к передают на спектральный анализ.
4.2.4.2. Определение никеля, алюминия, магния, марганца, кобальта, олова, меди и циркония
Пробы и образцы сравнения готовят в боксе. Для этого 100 мг пробы и 100 мг буферной смеси или 100 мг образца сравнения и 100 мг пятиокиси ниобия тщательно растирают в плексигласовой ступке в течение 5 мин. Подготовленную пробу или образец сравнения набивают в каналы трех графитовых электродов, предварительно обожженных в дуге постоянного тока при 7 А в течение 5 с.
Электроды устанавливают в штатив в вертикальном положении. Верхним электродом служит графитовый стержень, заточенный на конус. Между электродами зажигают дугу постоянного тока силой 7 А с последующим повышением (в течение 20 с) до 15 А. Электрод с пробой включен анодом.
Во избежание выброса материала из кратера электродов, ток включают при сомкнутых электродах с их последующим разведением, величина которого контролируется по проекции на промежуточной диафрагме. Время экспозиции - 120 с, промежуточная диафрагма - 5 мм.
Спектры в области длин волн 2500 - 3500 нм фотографируют с помощью спектрографа ДФС-13 с решеткой 600 штр/мм, используя трехлинзовую систему освещения щели на фотопластинку тип II чув. 15 ед., ширина щели спектрографа 15 мкм.
4.2.4.3. Определение меди
Пробу, приготовленную по п. 4.2.4.2, помещают в канал графитового электрода. Электрод с пробой или образцом сравнения служит анодом (нижний электрод). Верхним электродом является графитовый электрод, заточенный на конус. Между электродами зажигают дугу постоянного тока. В первые 15 с сила тока - 5 А, последующие 1 мин 45 с - 15 А. Полная экспозиция 120 с. Спектры фотографируют на спектрографе ДФС-13 с решеткой 1200 штр/мм с трехлинзовой осветительной системой. Фотопластинка типа ЭС чув. 9. Промежуточная диафрагма 0,8 мм. Шкалу длин волн устанавливают на 320 нм. Ширина щели спектрографа 15 мкм. Во время экспозиции расстояние между электродами поддерживают равным 3 мм.
Спектр каждой пробы и каждого образца сравнения регистрируют на фотопластинке по три раза. Экспонированные пластинки проявляют, промывают водой, фиксируют, окончательно промывают и сушат.
4.2.4.1 - 4.2.4.3. (Измененная редакция, Изм. № 1).
4.2.4.4. Обработка результатов
В каждой спектрограмме фотометрируют почернения аналитической линии определяемого элемента Sл+ф (табл. 6) и близлежащего фона Sф и вычисляют разность почернений DS = Sл+a - Sф.
Таблица 6
Определяемый элемент
Длина волны аналитической линии, нм
Алюминий
309,2
Магний
279,5
Марганец
279,4
Медь
327,4
Олово
284,0
Цирконий
339,2
Никель
300,2
Кобальт
304,4
По трем параллельным значениям DS1, DS2, DS3, полученным по трем спектрограммам, снятым для каждого образца, находят среднее арифметическое результатов
 .
.От полученных средних значений
 переходят к значениям
переходят к значениям  с помощью таблиц, приведенных в приложении к ГОСТ 13637.1-77.
с помощью таблиц, приведенных в приложении к ГОСТ 13637.1-77.Используя значения lg C и
 для образцов сравнения, строят градуировочный график в координатах
для образцов сравнения, строят градуировочный график в координатах  , lg C. По этому графику по значениям
, lg C. По этому графику по значениям  для пробы определяют содержание примеси в пробе.
для пробы определяют содержание примеси в пробе.Разность наибольших и наименьших из результатов трех параллельных и результатов двух анализов с доверительной вероятностью Р = 0,95 не должна превышать величин допускаемых расхождений, приведенных в табл. 7.
Таблица 7
Определяемый элемент
Массовая доля, %
Допускаемое расхождение, %
параллельных определений
результатов анализов
Алюминий
0,0005
0,005
0,01
0,0003
0,003
0,006
0,0002
0,002
0,004
Цирконий
0,001
0,005
0,01
0,0006
0,003
0,005
0,0004
0,002
0,003
Магний
0,001
0,005
0,01
0,0006
0,004
0,006
0,0001
0,003
0,004
Марганец
0,0005
0,005
0,01
0,0003
0,003
0,006
0,0002
0,002
0,004
Медь
0,005
0,01
0,06
0,003
0,003
0,006
0,02
0,002
0,002
0,003
0,01
0,002
Олово
0,001
0,005
0,01
0,0006
0,003
0,005
0,0004
0,002
0,003
Никель
0,001
0,005
0,001
0,0006
0,003
0,005
0,0004
0,002
0,003
Кобальт
0,0005
0,005
0,01
0,0003
0,003
0,005
0,0002
0,002
0,003
Допускаемые расхождения для промежуточных содержаний рассчитывают методом линейной интерполяции.
4.2.4.5. Контроль правильности результатов
Правильность результатов анализа серии проб контролируют для каждой определенной примеси при переходе к новому комплекту образцов сравнения, С этой целью для одной и той же пробы, содержащей определенную примесь в контролируемом диапазоне концентраций с использованием старого и нового комплектов образцов сравнения, получают четыре результата анализа и вычисляют средние арифметические значения. Затем находят разность большего и меньшего значений. Результаты анализа считают правильными, если указанная разность не превышает допускаемых расхождений результатов двух анализов пробы по содержанию определяемой примеси.
Контроль правильности проводят для каждого интервала между ближайшими по содержанию образцами сравнения по мере поступления на анализ соответствующих проб.
4.3. Массовую долю тантала, титана, кремния, железа, вольфрама, молибдена определяют по ГОСТ 18385.1-79 - ГОСТ 18385.4-79 или спектральными методами (пп. 4.3.1 - 4.3.3), кислорода и водорода - по ГОСТ 22720.1-77, азота - по ГОСТ 22720.1-77 или ГОСТ 22720.4-77.
Допускается применять другие методы анализа примесей, по точности не уступающие указанным.
При разногласиях в оценке химического состава его определяют по ГОСТ 18385.1-79 - ГОСТ 18385.4-79, ГОСТ 22720.1-77, ГОСТ 22720.1-77 и ГОСТ 22720.4-77.
Массовую долю углерода определяют по ГОСТ 22720.3-77. Кроме анализатора АН-160, допускается использовать приборы АН-7529 и АН-7560.
4.2.4.4. - 4.3. (Измененная редакция, Изм. № 1).
4.3.1. Спектральный метод определения примесей титана, кремния, железа, никеля, алюминия, магния, марганца, олова, меди, циркония, при массовой доле каждой примеси от 0,001 до 0,02.
Метод основан на возбуждении дугой постоянного тока и фотографической регистрации спектров образцов сравнения и спектров анализируемого материала, превращенного в оксиды прокаливанием, с последующим определением массовой доли примесей по градуировочным графикам, построенным в координатах: логарифм отношения интенсивности линии определяемого элемента к интенсивности фона lg(Iл/Iф) - логарифм массовой доли определяемого элемента lg C.
Относительное среднее квадратическое отклонение, характеризующее сходимость результатов параллельных определений, при массовой доле каждой примеси 0,001 % составляет 0,15, при массовой доле каждой примеси 0,02 % - 0,11.
Суммарная погрешность результата анализа с доверительной вероятностью Р = 0,95 при массовой доле примеси 0,00100 % не должна превышать ± 0,00023 % абс, при массовой доле примеси 0,0200 % - ± 0,0033 % абс.
4.3.1.1. Аппаратура, материалы и реактивы
Спектрограф ДФС-13 с решеткой 1200 штр/мм или аналогичный.
Источник постоянного тока УГЭ, или ВАС-275-100, или аналогичный.
Микроденситометр МД-100, или микрофотометр МФ-2, или аналогичный.
Спектропроектор типа ПС-18, или ДСП-2, или аналогичный.
Весы аналитические с погрешностью взвешивания не более 0,0002 г.
Весы торсионные ВТ-500 или аналогичные с погрешностью взвешивания не более 0,002 г.
Печь муфельная с терморегулятором, на температуру от 400 до 1100 °С.
Шкаф сушильный типа СНОД 3.5.3.5.3.5./3М или аналогичный.
Станок для заточки графитовых электродов.
Ступки и пестики из оргстекла.
Чашки платиновые по ГОСТ 6563-75.
Фотопластинки спектральные: диапозитивные, СП-2, СП-ЭС, обеспечивающие в условиях анализа нормальные почернения аналитических линий и близлежащего фона в спектре.
Порошок графитовый ос. ч. 8 - 4 по ГОСТ 23463-79 или аналогичный, обеспечивающий чистоту по определяемым примесям. Нижние электроды, выточенные из графитовых стержней ос. ч. 7 - 3 диаметром 6 мм, имеющие размеры, мм:
высота заточенной части....................... 10
диаметр заточенной части.................... 4,0
глубина кратера...................................... 3,8
диаметр кратера..................................... 2,5
Верхние электроды из графитовых стержней ос. ч. 7 - 3 диаметром 6 мм, заточенные на усеченный конус с площадкой диаметром 1,5 мм, высотой заточенной конической части 4 мм.
Натрий фтористый, ос. ч. 7 - 3.
Ниобия пятиокись для оптического стекловарения, ос. ч. 7 - 3.
Титана (IV) двуокись, ос. ч. 7 - 3.
Кремния (IV) двуокись по ГОСТ 9428-73, ч. д. а.
Железа (III) окись, ос. ч. 2 - 4.
Никеля (II) закись, ч. д. а.
Алюминия (III) окись, х. ч.
Магния (II), ч. д. а.
Марганца (IV) окись, ос. ч. 9 - 2.
Олова (IV) окись, ч. д. а.
Меди (II) окись (гранулированная) по ГОСТ 16539-79.
Циркония (IV) двуокись, ос. ч. 6 - 2.
Спирт этиловый ректификованный по ГОСТ 18300-87.
Лак идитоловый, 1 %-ный спиртовый раствор.
Метол по ГОСТ 25664-83.
Гидрохинон по ГОСТ 19627-74.
Натрий сернистокислый (сульфит) по ГОСТ 195-77.
Натрий углекислый по ГОСТ 83-79.
Калий бромистый по ГОСТ 4160-74.
Натрия тиосульфат кристаллический по ГОСТ 244-76.
Калий сернистокислый пиро (метабисульфит).
Вода дистиллированная по ГОСТ 6709-72.
Проявитель, готовят следующим образом: 2 г метола, 52 г сульфита натрия, 10 г гидрохинона, 40 г углекислого натрия, 5 г бромистого калия растворяют в воде, в указанной последовательности доводят объем раствора водой до 1000 см3, перемешивают и фильтруют.
Фиксаж, готовят следующим образом: 250 г тиосульфата натрия и 25 г метабисульфита калия растворяют в указанной последовательности в 750 - 800 см3 воды, доводят объем раствора водой до 1000 см3, перемешивают и фильтруют.
Допускается применять проявитель и фиксаж, рекомендованные для применяемых фотопластинок.
Основная смесь, представляющая собой механическую смесь оксида ниобия и оксидов определяемых элементов с массовой долей каждой примеси 1 % в расчете на содержание металла в смеси металлов. Для ее приготовления каждый препарат оксида помещают в отдельную чашку, прокаливают в течение 90 мин в муфельной печи при температурах, указанных в табл. 7, охлаждают в эксикаторе и берут навески, указанные в табл. 7а. Переносят в ступку сначала приблизительно одну четвертую часть навески пятиокиси ниобия, затем полностью навески оксидов всех элементов-примесей и тщательно растирают смесь в ступке в течение 60 мин, добавляя спирт для поддержания смеси в кашицеобразном состоянии. Затем в ту же ступку переносят оставшуюся часть навески пятиокиси ниобия и опять тщательно растирают смесь в течение 60 мин, добавляя спирт для поддержания смеси в кашицеобразном состоянии. После этого смесь сушат в сушильном шкафу, а затем прокаливают при температуре (400 ± 20) °С в течение 60 мин и охлаждают в эксикаторе.
Промежуточная смесь и рабочие образцы сравнения (РОС1 - РОС4); готовят, смешивая указанные в табл. 7б массы пятиокиси ниобия, основной смеси, промежуточной смеси и рабочего образца сравнения РОС2. Перед взятием навесок пятиокись ниобия прокаливают 90 мин при (950 ± 20) °С, а ОС, ПС и РОС2 - при температуре (400 ± 20) °С в течение 60 мин и охлаждают в эксикаторе. Смешивают тщательным растиранием в ступке в течение 60 мин, добавляя спирт для поддержания смеси в кашицеобразном состоянии. После этого смесь сушат в сушильном шкафу, прокаливают при температуре (400 ± 20) °С в течение 60 мин и охлаждают в эксикаторе.
Буферная смесь 95 % графитового порошка и 5 % фтористого натрия. Навески помещают в ступку и тщательно растирают в течение 30 мин.
4.3.1.2. Проведение анализа
Навеску порошка металлического ниобия массой 0,5 г помещают в платиновую чашку, прокаливают в муфельной печи при температуре 800 - 850 °С в течение 2 ч и охлаждают в эксикаторе. Переносят в ступку и смешивают с буферной смесью в соотношении 2:1 (по массе), помещают в пакет из кальки.
Каждый из рабочих образцов сравнения РОС1 - РОС4 также смешивают с буферной смесью в соотношении 2:1 (по массе).
Верхние и нижние электроды обжигают в дуге переменного тока при силе тока 10 А в течение 10 с.
Каждой из полученных смесей (смесь, полученная из навески пробы, и полученные из РОС1 - РОС4) плотно заполняют кратеры шести нижних электродов неоднократным погружением электродов в пакет со смесью. После этого в каждый нижний электрод помещают 2 капли спиртового раствора идитолового лака. Подсушивают электроды в сушильном шкафу при температуре 80 - 90 °С в течение (15 ± 1) мин.
В кассету спектрографа помещают:
в коротковолновую область спектра - диапозитивную фотопластинку;
в длинноволновую - фотопластинку марки СП-2.
Нижний электрод (с материалом пробы или с материалом рабочего образца сравнения) включают анодом дуги постоянного тока. Спектры фотографируют при следующих условиях:
сила тока................................................ 10 ± 0,5 А
межэлектродный промежуток............. 2 мм
экспозиция............................................. (40 ± 3) с
щель спектрографа................................ (0,020 ± 0,001) мм
промежуточная диафрагма.................. (5,0 ± 0,1) мм
деление шкалы длин волн.................... (303,0 ± 2,5) нм
Фотографируют по три раза спектр каждого рабочего образца сравнения и по три раза спектр каждой пробы, используя для каждого образца сравнения (или пробы) три из шести нижних электродов. Затем фотографирование спектров повторяют, используя оставшиеся три заполненных пробой (образцом сравнения) нижних электрода.
Экспонированные фотопластинки проявляют, промывают водой, фиксируют, окончательно промывают водой и сушат.
4.3.1.3. Обработка результатов
В каждой фотопластинке фотометрируют почернения аналитических линий определяемого элемента Sл+ф(табл. 7в) и близлежащего фона Sф и вычисляют разность почернений DS = Sл+ф - Sф.
По трем значениям DS1, DS2, DS3, полученным из трех спектрограмм, снятым для каждого образца на одной фотопластинке, находят среднее арифметическое DS. От полученных значений DS переходят к значениям lg(Iл/Iф) с помощью таблиц, приведенных в ГОСТ 13637.1-77.
Таблица 7а
Наименование препарата
Формула
Температура прокаливания перед взвешиванием, °С (пред. откл. ± 20 °С)
Масса навески прокаленного препарата оксида, г
Коэффициент пересчета массы металла на массу оксида
Масса металла в навеске оксида, г
Массовая доля металла в смеси металлов, %
Пятиокись ниобия
Nb2O5
950
10,2996
1,4305
7,2000
90
Двуокись титана
TiO2
1100
0,1334
1,6680
0,0800
1
Двуокись кремния
SiO2
1100
0,1711
2,1393
0,0800
1
Окись железа
Fe2O3
800
0,1144
1,4297
0,0800
1
Закись никеля
NiO
600
0,1018
1,2725
0,0800
1
Окись алюминия
Al2O3
1100
0,1512
1,8895
0,0800
1
Окись магния
MgO
1100
0,1327
1,6583
0,0800
1
Окись марганца
MnO2
400
0,1266
1,5825
0,0800
1
Окись олова
SnO2
600
0,1016
1,2696
0,0800
1
Окись меди
CuO
700
0,1001
1,2518
0,0800
1
Двуокись циркония
ZrO2
1100
0,1081
1,3508
0,0800
1
11,5406
8,0000
100
Используя значения lg C (где С - массовая доля определяемой примеси по табл. 7б) и полученные по первой фотопластинке значения lg(Iл/Iф) для рабочих образцов сравнения РОС1 - РОС4, строят градуировочный график в координатах lgC, lg(Iл/Iф). По этому графику, используя полученное по той же фотопластинке значение lg(Iл/Iф) для пробы, определяют массовую долю примеси в пробе - первый из двух результатов параллельных определений данной примеси.
Таблица 7б
Обозначение образца
Массовая доля каждой примеси в расчете на содержание металла в смеси металлов, %
Масса навески, г
Суммарная масса смеси оксидов, содержащая 8 г металла, г
прокаленного препарата пятиокиси ниобия
разбавляемого образца (в скобках приведено его обозначение)
Промежуточная смесь
0,100
10,2996
1,1541 (ОС)
11,4537
РОС1
0,020
9,1552
2,2907 (ПС)
11,4459
РОС2
0,009
10,4140
1,0308 (ПС)
11,4443
POС4
0,004
10,1726
1,2716 (РОС2)
11,4442
РОС3
0,003
11,1007
0,3436 (ПС)
11,4443
Таблица 7в
Определяемый элемент
Аналитическая линия, нм
Магний
285,21
Кремний
288,16
Марганец
294,92
Никель
300,25
Железо
302,06
Титан
307,86
Алюминий
308,22
Цирконий
316,60
Олово
317,50
Медь
327,47
Результат второго параллельного определения получают таким же образом по второй пластинке.
Разность большего и меньшего результатов параллельных определений с доверительной вероятностью Р = 0,95 не должна превышать допускаемого расхождения, указанного в табл. 7г.
Таблица 7г
Массовая доля примеси, %
Абсолютное допускаемое расхождение двух результатов параллельных определений, %
0,0010
0,0004
0,020
0,006
Допускаемое расхождение для промежуточных значений массовой доли примеси, не указанных в таблице, находят методом линейного интерполирования.
Если этот норматив удовлетворяется, вычисляют результат анализа - среднее арифметическое результатов двух параллельных определений.
4.3.1.4. Контроль правильности результатов - по п. 4.2.4.5.
4.3.2. Спектральный метод определения примесей вольфрама, молибдена и кобальта при массовой доле каждой примеси от 0,001 до 0,01 %
Метод основан на возбуждении дугой постоянного тока и фотографической регистрации спектров образцов сравнения и анализируемого материала, превращенного в оксиды прокаливанием, с. последующим определением массовой доли примесей по градуировочным графикам.
Относительное среднее квадратическое отклонение, характеризующее сходимость результатов параллельных определений каждой примеси, составляет 0,17 - при массовой доле примеси и 0,10 - при массовой доле примеси 0,005 - 0,010 %.
4.3.2.1. Аппаратура, материалы и реактивы
Спектрограф ДФС-13 с решеткой 600 штр/мм или аналогичный.
Источник постоянного тока ВАС-275-100 или аналогичный.
Микрофотометр МФ-2 или аналогичный.
Спектропроектор ДСП-2 или аналогичный.
Шкаф сушильный типа СНОД 3.5.3.5.3.5/3М или аналогичный.
Весы аналитические с погрешностью взвешивания не более 0,0002 г.
Весы торсионные ВТ-500 или аналогичные.
Печь муфельная с терморегулятором на температуру от 400 до 1000 °С.
Электроплитки с закрытой спиралью и покрытием, исключающим загрязнение определяемыми элементами.
Станок для заточки графитовых электродов.
Ступки и пестики из оргстекла.
Чашки платиновые по ГОСТ 6563-75.
Эксикаторы.
Фотопластинки формата 9´12 см спектральные тип II и ЭС или аналогичные, обеспечивающие в условиях анализа нормальные почернения аналитических линий и фона в спектре.
Нижние электроды типа «рюмка», выточенные из графитовых стержней ос. ч. 7 - 3 диаметром 6 мм, имеющие размеры, мм:
высота «рюмки»...................... 5
глубина кратера...................... 3
диаметр кратера...................... 4
диаметр шейки........................ 3,5
высота шейки.......................... 3,5
Верхние электроды - стержни диаметром 6 мм из графита ос. ч. 7 - 3, заточенные на цилиндр диаметром 4 мм.
Кислота соляная по ГОСТ 14261-77, ос. ч.
Ниобия пятиокись, ос. ч. 7 - 3, в спектре которой в условиях анализа отсутствуют аналитические линии определяемых примесей.
Вольфрама (VI) окись, ч. д. а.
Молибдена (IV) окись, ч. д. а.
Кобальта (II, III) окись по ГОСТ 4467-79.
Сурьмы (III) окись, х. ч.
Свинец хлористый.
Калий сернокислый, ос. ч. 6 - 4.
Спирт этиловый ректификованный по ГОСТ 18300-87.
Метол по ГОСТ 25664-83.
Гидрохинон по ГОСТ 5644-75.
Натрий сернистокислый (сульфит) по ГОСТ 195-77.
Калий бромистый по ГОСТ 4160-74, ч. д. а.
Натрий углекислый по ГОСТ 83-79, ч. д. а.
Натрия тиосульфат кристаллический по ГОСТ 244-76.
Калий сернистокислый пиро (метабисульфит).
Вода дистиллированная по ГОСТ 6709-72.
Посуда химическая термостойкая: стаканы вместимостью на 100, 500 и 1000 см3, воронки.
Проявитель, готовят следующим образом: 2 г метола, 52 г сульфита натрия, 10 г гидрохинона, 40 г углекислого натрия, 5 г бромистого калия растворяют в воде в указанной последовательности, доводят объем раствора водой до 1000 см3, перемешивают и фильтруют.
Фиксаж, готовят следующим образом: 250 г тиосульфата натрия и 25 г метабисульфита калия растворяют в указанной последовательности в 750 - 800 см3 воды, доводят объем раствора водой до 1000 см3, перемешивают и фильтруют.
Допускается применять проявитель и фиксаж, рекомендованные для применяемых фотопластинок.
Буферная смесь, готовят следующим образом: тщательно растирают в ступке 7,4900 г хлористого свинца, 2,5000 г сернокислого калия, 0,0100 г окиси сурьмы. Время истирания на виброистирателе 40 - 50 мин, вручную - 90 - 120 мин.
Основная смесь, представляющая собой механическую смесь оксидов ниобия и определяемых примесей с массовой долей каждой примеси 1 % в расчете на содержание металла в смеси металлов. Для приготовления смеси каждый препарат оксидов помещают в отдельную чашку, прокаливают в течение 90 мин в муфельной печи при температурах, указанных в табл. 7д, охлаждают в эксикаторе и берут навески, указанные в табл. 7д. Переносят в ступку сначала приблизительно 1/4 часть навески пятиокиси ниобия, затем полностью навески оксидов всех примесей и тщательно растирают смесь в ступке в течение 60 мин, добавляя спирт для поддержания смеси в кашицеобразном состоянии. Затем в ту же ступку переносят оставшуюся часть навески пятиокиси ниобия и опять тщательно растирают смесь в течение 60 мин, добавляя спирт для поддержания смеси в кашицеобразном состоянии. После этого смесь сушат в сушильном шкафу, затем прокаливают при температуре (400 ± 20) °C в течение 60 мин и охлаждают в эксикаторе.
Промежуточную смесь и рабочие образцы сравнения (РОС1 - РОС4) готовят, смешивая указанные в табл. 7е навески пятиокиси ниобия, основной смеси, промежуточной смеси и рабочего образца сравнения РОС1. Перед взятием навесок пятиокись ниобия прокаливают 90 мин при (950 ± 20) °С, а ОС, ПС и РОС1 - при температуре (400 ± 20) °С в течение 60 мин; охлаждают в эксикаторе. Смешивают тщательным растиранием в ступке в течение 90 мин, добавляя спирт для поддержания смеси в кашицеобразном состоянии. После этого смесь сушат в сушильном шкафу, прокалива
Таблица 7д
Наименование препарата
Формула
Температура прокаливания перед взвешиванием, °С
Масса навески прокаленного препарата оксида, г
Коэффициент пересчета массы металла на массу оксида
Масса металла в навеске оксида, г
Массовая доля металла в смеси металлов, %
Пятиокись ниобия
Nb2O5
900 - 1000
13,8759
1,4305
9,7000
97
Трехокись вольфрама
WO3
650
0,1261
1,2611
0,1000
1
Трехокись молибдена
MoO3
450 - 500
0,1500
1,5003
0,1000
1
Окись кобальта
Со2О3
800
0,1407
1,4072
0,1000
1
14,2927
10,0000
100
находят значения lg(Iл/Iф), пользуясь таблицами по ГОСТ 13637-77. Используя значения lg C ( где С - массовая доля вольфрама по табл. 7е) и полученные по первой фотопластинке значения lg(Iл/Iф) для рабочих образцов сравнения РОС1 - РОС4, строят градуировочный график в координатах lgC, lg(Iл/Iф). Поэтому графику, используя полученные по той же фотопластинке значения lg(Iл/Iф) для пробы, определяют массовую долю вольфрама в пробе - первый из двух результатов параллельных определений. Результат второго параллельного определения вольфрама получают таким же образом по второй фотопластинке.
При определении молибдена и кобальта для каждого из трех спектров (пробы или образца сравнения), снятых на одной фотопластинке, находят значение DS = Sл - Scи вычисляют среднее арифметическое трех значений - значение
 . По полученным значениям DS для образцов сравнения строят градуировочный график в координатах lgC, DS, где С - массовая доля определяемого элемента в образцах сравнения согласно табл. 7. По этому графику, используя полученные по той же фотопластинке значения DS для пробы, определяют массовую долю определяемого элемента в пробе - первый из двух результатов параллельных определений. Результат второго параллельного определения получают таким же образом по второй фотопластинке.
. По полученным значениям DS для образцов сравнения строят градуировочный график в координатах lgC, DS, где С - массовая доля определяемого элемента в образцах сравнения согласно табл. 7. По этому графику, используя полученные по той же фотопластинке значения DS для пробы, определяют массовую долю определяемого элемента в пробе - первый из двух результатов параллельных определений. Результат второго параллельного определения получают таким же образом по второй фотопластинке.Таблица 7е
Обозначение образца
Массовая доля каждой из определяемых примесей, в расчете на содержание металла в смеси металлов, %
Масса навески, г
Суммарная масса смеси оксидов, содержащая 10 г металлов, г
прокаленного препарата пятиокиси ниобия
разбавляемого образца (в скобках приведено его обозначение)
ПС
0,100
12,8745
1,4293 (ПС)
14,3038
РОС1
0,010
12,8745
1,4301 (ПС)
14,3049
РОС2
0,004
13,7328
0,5722 (ПС)
14,3050
РОС3
0,002
14,0189
0,2861 (ПС)
14,3050
РОС4
0,001
12,8745
1,4305 (РОС1)
14,3050
Разность большего и меньшего результатов параллельных определений элемента с доверительной вероятностью Р = 0,95 не должна превышать допускаемого расхождения, приведенного в табл. 7ж и табл. 7з.
Если этот норматив удовлетворяется, вычисляют результат анализа - среднее арифметическое двух результатов параллельных определений.
Таблица 7ж
Массовая доля примеси, %
Абсолютное допускаемое расхождение двух результатов параллельных определений, %
0,0010
0,0005
0,0050
0,0014
0,0100
0,0028
Допускаемые расхождения для промежуточных значений массовой доли примеси, не указанных в таблице, находят методом линейной интерполяции.
4.3.2.4. Контроль правильности результатов - по п. 4.2.4.5.
4.3.3. Экстракционно-фотометрический метод определения тантала (от 0,02 до 0,10 %)
Метод основан на измерении оптической плотности толуольного экстракта фтортанталата бриллиантового зеленого.
4.3.3.1. Аппаратура, материалы и реактивы
Весы аналитические.
Таблица 7з
Определяемый элемент
Аналитическая линия, нм
Интервал определяемых значений массовой доли, %
Вольфрам
400,87
От 0,001 до 0,01
Молибден
319,40
» 0,001 » 0,004
320,88
» 0,001 » 0,01
Кобальт
340,51
» 0,001 » 0,004
345,35
» 0,001 » 0,01
Плитка электрическая лабораторная с закрытой спиралью мощностью 3 кВт.
Центрифуга лабораторная, марки ЦЛК-1 или аналогичная.
Колориметр фотоэлектрический концентрационный КФК-2 или аналогичный.
Пипетки 1-2-2; 2-2-5; 2-2-10; 2-2-20; 2-2-25; 2-2-50; 6-2-10 по ГОСТ 20292-74.
Цилиндры 1-500; 1-2000 по ГОСТ 1770-74.
Бюретки 6-2-5; 1-2-100 по ГОСТ 20292-74.
Колбы 2-100-2; 2-200-2; 2-500-2 по ГОСТ 1770-741
Стакан В-1-100 ТС по ГОСТ 25336-82.
Стакан фторопластовый с носиком вместимостью 100 см3.
Банка БН-0,5, по ГОСТ 17000-71.
Бидон БДЦ-5,0 по ГОСТ 17000-71.
Пробки из пластмассы по ГОСТ 1770-74.
Цилиндры из полиэтилена вместимостью 60 см3.
Пробирки центрифужные из полиэтилена вместимостью 10 см3.
Пипетки из полиэтилена вместимостью 10 см3.
Кислота серная по ГОСТ 4204-77, х. ч. раствор 5 моль/дм3 и 1,4 моль/дм3.
Кислота азотная по ГОСТ 4461-77, х. ч.
Кислота фтористоводородная по ГОСТ 10484-78, х. ч., раствор 7,5 моль/дм3.
Раствор для отмывки экстрактов с концентрациями серной кислоты 1,18 моль/дм3 и фтористоводородной кислоты 0,98 моль/дм3. Для приготовления 5 дм3 раствора в полиэтиленовый бидон помещают 245 см3 раствора фтористоводородной кислоты 20 моль/дм3, 1175 см3 раствора серной кислоты 5 моль/дм3, 3580 см3 дистиллированной воды и перемешивают в течение 30 - 40 с.
Бриллиантовый зеленый, ч., раствор 3 г/дм3, готовят растворением 3 г красителя в 1 дм3 воды на холоду в течение 1 ч при перемешивании с помощью электромеханической мешалки.
Толуол по ГОСТ 5789-78, ч. д. а.
Ацетон по ГОСТ 2603-79, ч. д. а.
Аммоний сернокислый по ГОСТ 3769-78, х. ч.
Порошок танталовый (высокой чистоты), с массовой долей тантала не менее 99,5 %.
Вода дистиллированная по ГОСТ 6709-72.
4.3.3.2. Подготовка к измерению
4.3.3.2.1. Приготовление основного раствора и рабочих растворов
Основной раствор пятиокиси тантала 0,200 г/дм3: навеску металлического порошка тантала 0,0819 г, взвешенную с погрешностью ± 0,0005 г, помещают во фторопластовый стакан, добавляют полиэтиленовой пипеткой 5,0 см3 концентрированной фтористоводородной кислоты, 0,5 см3 азотной кислоты, нагревают на плитке до полного растворения навески и упаривают до объема 1 - 2 см3. Раствор переводят в мерную колбу вместимостью 500 см3, в которую предварительно помещают 250 см3 дистиллированной воды, доводят до метки и перемешивают в течение 30 - 40 с. Приготовленный раствор хранят в полиэтиленовой посуде.
Рабочие растворы пятиокиси тантала 2,0 и 20,0 мкг/см3 отбирают пипеткой 2,0 и 20,0 см3 основного раствора в мерные колбы вместимостью 200 см3, добавляют 56,0 см3 раствора серной кислоты 5 моль/дм3, доводят водой до метки и перемешивают в течение 30 - 40 с.
4.3.3.2.2. Построение градуировочного графика
В полиэтиленовые ампулы помещают из бюретки 2,0; 4,0; 6,0; 8,0; 10,0 см3 рабочего раствора 2,0 мкг/см3 и 1,0; 2,0; 3,0; 4,0; 5,0 см3 рабочего раствора 20,0 мкг/см3. Доводят раствором серной кислоты концентрации 1,4 моль/дм3 (2,8 н) до 10,0 см3, добавляют полиэтиленовой пипеткой 1,5 см3 раствора фтористоводородной кислоты 7,5 моль/дм3, 25,0 см3 толуола, добавляют из бюретки 11,0 см3 раствора бриллиантового зеленого и встряхивают в течение 60 с на электромеханическом встряхивателе или вручную. После расслаивания фаз в течение 60 - 90 с 10 см3 экстракта помещают в центрифужную пробирку и центрифугируют в течение 3 мин со скоростью 3000 мин-1.
Оптическую плотность измеряют на КФК-2 в кюветах с толщиной слоя поглощения 5,0 мм в интервале 20 - 100 мкг пятиокиси тантала и 30,0 мм в интервале 4 - 20 мкг пятиокиси тантала при λmax = (590 ± 10) нм. В качестве раствора сравнения применяют толуол.
Одновременно через все стадии проводят два параллельных контрольных опыта. Оптическая плотность контрольного опыта не должна превышать 0,03 в кювете 30 мм и 0,005 - в кювете 5 мм. По полученным данным строят два градуировочных графика.
4.3.3.3. Проведение измерений
Пробу массой 0,1000 г, взвешенную с погрешностью не более 0,0005 г, помещают во фторопластовый стакан, добавляют полиэтиленовой пипеткой 10 см3 концентрированной фтористоводородной кислоты, затем пипеткой 2,0 см3 азотной кислоты и 8,0 см3 концентрированной серной кислоты, нагревают на плитке до начала выделения паров серной кислоты, затем продолжают нагрев еще 2 - 3 мин. Стаканы охлаждают до температуры (25 ± 5) °С, добавляют 3,0 г сульфата аммония, разбавляют водой до 10 см3 и переводят в мерную колбу вместимостью 100 см3, доводят водой до метки и перемешивают 30 - 40 с.
Аликвотную часть полученного раствора, содержащую 4 - 100 мкг пятиокиси тантала, помещают в полиэтиленовый цилиндр вместимостью 60 см3, доводят раствором серной кислоты концентрации 5 моль/дм3 до 10,0 см3, добавляют 1,5 см3 раствора фтористоводородной кислоты концентрации 7,5 моль/дм3 и оставляют на 8 - 10 мин. Далее добавляют пипеткой 25,0 см3 толуола, 11,0 см3 раствора бриллиантового зеленого и производят экстракцию, как описано в п. 4.3.3.2. После расслаивания фазы разделяют и экстракт в количестве 20 - 25 см3 отмывают. Добавляют 10,5 см3 раствора для отмывки (полиэтиленовой пипеткой), 10,0 см3 раствора бриллиантового зеленого из бюретки и встряхивают, как описано в п. 4.3.3.2. После расслаивания фазы разделяют и экстракт в количестве не менее 16,0 см3 вновь подвергают операции отмывки. После расслаивания фаз 10 см3 экстракта помещают в центрифужную пробирку и центрифугируют в течение 3 мин со скоростью 3000 об/мин.
Оптическую плотность экстракта измеряют на КФК-2, как описано в п. 4.3.3.2.2. В закрытых полиэтиленовых пробирках экстракты стабильны в течение 4 ч. Допускается проведение экстракции и отмывки экстрактов одновременно в шестнадцати пробирках. Массу пятиокиси тантала определяют по градуировочному графику.
4.3.3.4. Обработка результатов
Массовую долю тантала (X) в процентах вычисляют по формуле
где m - масса пятиокиси тантала, найденная по градуировочному графику, мкг;
m1- масса навески пробы, г;
a - аликвотная часть раствора, отбираемая для экстракции, см3;
V - объем мерной колбы, равный 100 см3;
1,221 - коэффициент пересчета.
За результат измерений принимают среднее арифметическое результатов двух параллельных определений.
Допускаемые расхождения результатов двух параллельных определений не должны превышать значений допускаемых расхождений, приведенных в табл. 7и.
4.3.3.5. Контроль правильности анализа
Контроль правильности анализа проводят методом добавок.
Суммарная массовая доля тантала в пробе с добавкой должна быть не меньше утроенного значения нижней границы определяемых массовых долей и не больше верхней границы определяемых массовых долей.
Таблица 7и
Массовая доля тантала, %
Допускаемые расхождения, %
0,02
0,01
0,05
0,01
0,10
0,02
Суммарное содержание тантала (Х1) в пробе с добавкой в процентах вычисляют по формуле
где Хан - массовая доля тантала в пробе, %;
m1- масса тантала, введенная с добавкой, мкг;
m2- масса навески пробы, г.
Анализ считают правильным (Р = 0,95), если разность большей и меньшей из двух величин Х1и результата анализа пробы с добавкой не превышает
где d1- допускаемое расхождение между результатами двух параллельных определений в пробе без добавки;
d2- допускаемое расхождение между результатами двух параллельных определений в пробе с добавкой.
4.3.1 - 4.3.3.5. (Введены дополнительно, Изм. № 1).
Источник: ГОСТ 26252-84: Порошок ниобиевый. Технические условия оригинал документа
Русско-английский словарь нормативно-технической терминологии > Спектральный метод определения никеля, алюминия, магния, марганца, кобальта, олова, меди и циркония в ниобии
13 ИБП для централизованных систем питания
ИБП для централизованных систем питания
ИБП для централизованного питания нагрузок
-
[Интент]ИБП для централизованных систем питания
А. П. Майоров
Для многих предприятий всесторонняя защита данных имеет жизненно важное значение. Кроме того, есть виды деятельности, в которых прерывания подачи электроэнергии не допускаются даже на доли секунды. Так работают расчетные центры банков, больницы, аэропорты, центры обмена трафиком между различными сетями. В такой же степени критичны к электропитанию телекоммуникационное оборудование, крупные узлы Интернет, число ежедневных обращений к которым исчисляется десятками и сотнями тысяч. Третья часть обзора по ИБП посвящена оборудованию, предназначенному для обеспечения питания особо важных объектов.
Централизованные системы бесперебойного питания применяют в тех случаях, когда прерывание подачи электроэнергии недопустимо для работы большинства единиц оборудования, составляющих одну информационную или технологическую систему. Как правило, проблемы питания рассматривают в рамках единого проекта наряду со многими другими подсистемами здания, поскольку они требуют вложения значительных средств и увязки с силовой электропроводкой, коммутационным электрооборудованием и аппаратурой кондиционирования. Изначально системы бесперебойного питания рассчитаны на долгие годы эксплуатации, их срок службы можно сравнить со сроком службы кабельных подсистем здания и основного компьютерного оборудования. За 15—20 лет функционирования предприятия оснащение его рабочих станций обновляется три-четыре раза, несколько раз изменяется планировка помещений и производится их ремонт, но все эти годы система бесперебойного питания должна работать безотказно. Для ИБП такого класса долговечность превыше всего, поэтому в их технических спецификациях часто приводят значение важнейшего технического показателя надежности — среднего времени наработки на отказ (Mean Time Before Failure — MTBF). Во многих моделях с ИБП оно превышает 100 тыс. ч, в некоторых из них достигает 250 тыс. ч (т. е. 27 лет непрерывной работы). Правда, сравнивая различные системы, нужно учитывать условия, для которых этот показатель задан, и к предоставленным цифрам относиться осторожно, поскольку условия работы оборудования разных производителей неодинаковы.
Батареи аккумуляторов
К сожалению, наиболее дорогостоящий компонент ИБП — батарея аккумуляторов так долго работать не может. Существует несколько градаций качества батарей, которые различаются сроком службы и, естественно, ценой. В соответствии с принятой два года назад конвенцией EUROBAT по среднему сроку службы батареи разделены на четыре группы:
10+ — высоконадежные,
10 — высокоэффективные,
5—8 — общего назначения,
3—5 — стандартные коммерческие.Учитывая исключительно жесткую конкуренцию на рынке ИБП малой мощности, производители стремятся снизить до минимума начальную стоимость своих моделей, поэтому часто комплектуют их самыми простыми батареями. Применительно к этой группе продуктов такой подход оправдан, поскольку упрощенные ИБП изымают из обращения вместе с защищаемыми ими персональными компьютерами. Впервые вступающие на этот рынок производители, пытаясь оттеснить конкурентов, часто используют в своих интересах неосведомленность покупателей о проблеме качества батарей и предлагают им сравнимые по остальным показателям модели за более низкую цену. Имеются случаи, когда партнеры крупной фирмы комплектуют ее проверенные временем и признанные рынком модели ИБП батареями, произведенными в развивающихся странах, где контроль за технологическим процессом ослаблен, а, значит, срок службы батарей меньше по сравнению с "кондиционными" изделиями. Поэтому, подбирая для себя ИБП, обязательно поинтересуйтесь качеством батареи и ее производителем, избегайте продукции неизвестных фирм. Следование этим рекомендациям сэкономит вам значительные средства при эксплуатации ИБП.
Все сказанное еще в большей степени относится к ИБП высокой мощности. Как уже отмечалось, срок службы таких систем исчисляется многими годами. И все же за это время приходится несколько раз заменять батареи. Как это ни покажется странным, но расчеты, основанные на ценовых и качественных параметрах батарей, показывают, что в долгосрочной перспективе наиболее выгодны именно батареи высшего качества, несмотря на их первоначальную стоимость. Поэтому, имея возможность выбора, устанавливайте батареи только "высшей пробы". Гарантированный срок службы таких батарей приближается к 15 годам.
Не менее важный аспект долговечности мощных систем бесперебойного питания — условия эксплуатации аккумуляторных батарей. Чтобы исключить непредсказуемые, а следовательно, часто приводящие к аварии перерывы в подаче электропитания, абсолютно все включенные в приведенную в статье таблицу модели оснащены самыми совершенными схемами контроля за состоянием батарей. Не мешая выполнению основной функции ИБП, схемы мониторинга, как правило, контролируют следующие параметры батареи: зарядный и разрядный токи, возможность избыточного заряда, рабочую температуру, емкость.
Кроме того, с их помощью рассчитываются такие переменные, как реальное время автономной работы, конечное напряжение зарядки в зависимости от реальной температуры внутри батареи и др.
Подзарядка батареи происходит по мере необходимости и в наиболее оптимальном режиме для ее текущего состояния. Когда емкость батареи снижается ниже допустимого предела, система контроля автоматически посылает предупреждающий сигнал о необходимости ее скорой замены.
Топологические изыски
Долгое время специалисты по системам электропитания руководствовались аксиомой, что мощные системы бесперебойного питания должны иметь топологию on-line. Считается, что именно такая топология гарантирует защиту от всех нарушений на линиях силового питания, позволяет фильтровать помехи во всем частотном диапазоне, обеспечивает на выходе чистое синусоидальное напряжение с номинальными параметрами. Однако за качество электропитания приходится платить повышенным выделением тепловой энергии, сложностью электронных схем, а следовательно, потенциальным снижением надежности. Но, несмотря на это, за многолетнюю историю выпуска мощных ИБП были разработаны исключительно надежные аппараты, способные работать в самых невероятных условиях, когда возможен отказ одного или даже нескольких узлов одновременно. Наиболее важным и полезным элементом мощных ИБП является так называемый байпас. Это обходной путь подачи энергии на выход в случае ремонтных и профилактических работ, вызванных отказом некоторых компонентов систем или возникновением перегрузки на выходе. Байпасы бывают ручными и автоматическими. Они формируются несколькими переключателями, поэтому для их активизации требуется некоторое время, которое инженеры постарались снизить до минимума. И раз уж такой переключатель был создан, то почему бы не использовать его для снижения тепловыделения в то время, когда питающая сеть пребывает в нормальном рабочем состоянии. Так появились первые признаки отступления от "истинного" режима on-line.
Новая топология отдаленно напоминает линейно-интерактивную. Устанавливаемый пользователем системы порог срабатывания определяет момент перехода системы в так называемый экономный режим. При этом напряжение из первичной сети поступает на выход системы через байпас, однако электронная схема постоянно следит за состоянием первичной сети и в случае недопустимых отклонений мгновенно переключается на работу в основном режиме on-line.
Подобная схема применена в ИБП серии Synthesis фирмы Chloride (Сети и системы связи, 1996. № 10. С. 131), механизм переключения в этих устройствах назван "интеллектуальным" ключом. Если качество входной линии укладывается в пределы, определяемые самим пользователем системы, аппарат работает в линейно-интерактивном режиме. При достижении одним из контролируемых параметров граничного значения система начинает работать в нормальном режиме on-line. Конечно, в этом режиме система может работать и постоянно.
За время эксплуатации системы отход от исходной аксиомы позволяет экономить весьма значительные средства за счет сокращения тепловыделения. Сумма экономии оказывается сопоставимой со стоимостью оборудования.
Надо отметить, что от своих исходных принципов отошла еще одна фирма, ранее выпускавшая только линейно-интерактивные ИБП и ИБП типа off-line сравнительно небольшой мощности. Теперь она превысила прежний верхний предел мощности своих ИБП (5 кВА) и построила новую систему по топологии on-line. Я имею в виду фирму АРС и ее массив электропитания Simmetra (Сети и системы связи. 1997. № 4. С. 132). Создатели попытались заложить в систему питания те же принципы повышения надежности, которые применяют при построении особо надежной компьютерной техники. В модульную конструкцию введена избыточность по отношению к управляющим модулям и батареям. В любом из трех выпускаемых шасси из отдельных модулей можно сформировать нужную на текущий момент систему и в будущем наращивать ее по мере надобности. Суммарная мощность самого большого шасси достигает 16 кВА. Еще рано сравнивать эту только что появившуюся систему с другими включенными в таблицу. Однако факт появления нового продукта в этом исключительно устоявшемся секторе рынка сам по себе интересен.
Архитектура
Суммарная выходная мощность централизованных систем бесперебойного питания может составлять от 10—20 кВА до 200—300 МВА и более. Соответственно видоизменяется и структура систем. Как правило, она включают в себя несколько источников, соединенных параллельно тем или иным способом. Аппаратные шкафы устанавливают в специально оборудованных помещениях, где уже находятся распределительные шкафы выходного напряжения и куда подводят мощные входные силовые линии электропитания. В аппаратных помещениях поддерживается определенная температура, а за функционированием оборудования наблюдают специалисты.
Многие реализации системы питания для достижения необходимой надежности требуют совместной работы нескольких ИБП. Существует ряд конфигураций, где работают сразу несколько блоков. В одних случаях блоки можно добавлять постепенно, по мере необходимости, а в других — системы приходится комплектовать в самом начале проекта.
Для повышения суммарной выходной мощности используют два варианта объединения систем: распределенный и централизованный. Последний обеспечивает более высокую надежность, но первый более универсален. Блоки серии EDP-90 фирмы Chloride допускают объединение двумя способами: и просто параллельно (распределенный вариант), и с помощью общего распределительного блока (централизованный вариант). При выборе способа объединения отдельных ИБП необходим тщательный анализ структуры нагрузки, и в этом случае лучше всего обратиться за помощью к специалистам.
Применяют параллельное соединение блоков с централизованным байпасом, которое используют для повышения общей надежности или увеличения общей выходной мощности. Число объединяемых блоков не должно превышать шести. Существуют и более сложные схемы с избыточностью. Так, например, чтобы исключить прерывание подачи питания во время профилактических и ремонтных работ, соединяют параллельно несколько блоков с подключенными к отдельному ИБП входными линиями байпасов.
Особо следует отметить сверхмощные ИБП серии 3000 фирмы Exide. Суммарная мощность системы питания, построенная на модульных элементах этой серии, может достигать нескольких миллионов вольт-ампер, что сравнимо с номинальной мощностью генераторов некоторых электростанций. Все компоненты серии 3000 без исключения построены на модульном принципе. На их основе можно создать особо мощные системы питания, в точности соответствующие исходным требованиям. В процессе эксплуатации суммарную мощность систем можно наращивать по мере увеличения нагрузки. Однако следует признать, что систем бесперебойного питания такой мощности в мире не так уж много, их строят по специальным контрактам. Поэтому серия 3000 не включена в общую таблицу. Более подробные данные о ней можно получить на Web-узле фирмы Exide по адресу http://www.exide.com или в ее московском представительстве.
Важнейшие параметры
Для систем с высокой выходной мощностью очень важны показатели, которые для менее мощных систем не имеют первостепенного значения. Это, например, КПД — коэффициент полезного действия (выражается либо действительным числом меньше единицы, либо в процентах), показывающий, какая часть активной входной мощности поступает к нагрузке. Разница значений входной и выходной мощности рассеивается в виде тепла. Чем выше КПД, тем меньше тепловой энергии выделяется в аппаратной комнате и, значит, для поддержания нормальных рабочих условий требуется менее мощная система кондиционирования.
Чтобы представить себе, о каких величинах идет речь, рассчитаем мощность, "распыляемую" ИБП с номинальным значением на выходе 8 МВт и с КПД, равным 95%. Такая система будет потреблять от первичной силовой сети 8,421 МВт — следовательно, превращать в тепло 0,421 МВт или 421 кВт. При повышении КПД до 98% при той же выходной мощности рассеиванию подлежат "всего" 163 кВт. Напомним, что в данном случае нужно оперировать активными мощностями, измеряемыми в ваттах.
Задача поставщиков электроэнергии — подавать требуемую мощность ее потребителям наиболее экономным способом. Как правило, в цепях переменного тока максимальные значения напряжения и силы тока из-за особенностей нагрузки не совпадают. Из-за этого смещения по фазе снижается эффективность доставки электроэнергии, поскольку при передаче заданной мощности по линиям электропередач, через трансформаторы и прочие элементы систем протекают токи большей силы, чем в случае отсутствия такого смещения. Это приводит к огромным дополнительным потерям энергии, возникающим по пути ее следования. Степень сдвига по фазе измеряется не менее важным, чем КПД, параметром систем питания — коэффициентом мощности.
Во многих странах мира существуют нормы на допустимое значение коэффициента мощности систем питания и тарифы за электроэнергию нередко зависят от коэффициента мощности потребителя. Суммы штрафов за нарушение нормы оказываются настольно внушительными, что приходится заботиться о повышении коэффициента мощности. С этой целью в ИБП встраивают схемы, которые компенсируют сдвиг по фазе и приближают значение коэффициента мощности к единице.
На распределительную силовую сеть отрицательно влияют и нелинейные искажения, возникающие на входе блоков ИБП. Почти всегда их подавляют с помощью фильтров. Однако стандартные фильтры, как правило, уменьшают искажения только до уровня 20—30%. Для более значительного подавления искажений на входе систем ставят дополнительные фильтры, которые, помимо снижения величины искажений до нескольких процентов, повышают коэффициент мощности до 0,9—0,95. С 1998 г. встраивание средств компенсации сдвига по фазе во все источники электропитания компьютерной техники в Европе становится обязательным.
Еще один важный параметр мощных систем питания — уровень шума, создаваемый такими компонентами ИБП, как, например, трансформаторы и вентиляторы, поскольку их часто размещают вместе в одном помещении с другим оборудованием — там где работает и персонал.
Чтобы представить себе, о каких значениях интенсивности шума идет речь, приведем для сравнения такие примеры: уровень шума, производимый шелестом листвы и щебетанием птиц, равен 40 дБ, уровень шума на центральной улице большого города может достигать 80 дБ, а взлетающий реактивный самолет создает шум около 100 дБ.
Достижения в электронике
Мощные системы бесперебойного электропитания выпускаются уже более 30 лет. За это время бесполезное тепловыделение, объем и масса их сократились в несколько раз. Во всех подсистемах произошли и значительные технологические изменения. Если раньше в инверторах использовались ртутные выпрямители, а затем кремниевые тиристоры и биполярные транзисторы, то теперь в них применяются высокоскоростные мощные биполярные транзисторы с изолированным затвором (IGBT). В управляющих блоках аналоговые схемы на дискретных компонентах сначала были заменены на цифровые микросхемы малой степени интеграции, затем — микропроцессорами, а теперь в них установлены цифровые сигнальные процессоры (Digital Signal Processor — DSP).
В системах питания 60-х годов для индикации их состояния использовались многочисленные аналоговые измерительные приборы. Позднее их заменили более надежными и информативными цифровыми панелями из светоизлучающих диодов и жидкокристаллических индикаторов. В наше время повсеместно используют программное управление системами питания.
Еще большее сокращение тепловых потерь и общей массы ИБП дает замена массивных трансформаторов, работающих на частоте промышленной сети (50 или 60 Гц), высокочастотными трансформаторами, работающими на ультразвуковых частотах. Между прочим, высокочастотные трансформаторы давно применяются во внутренних источниках питания компьютеров, а вот в ИБП их стали устанавливать сравнительно недавно. Применение IGBT-приборов позволяет строить и бестрансформаторные инверторы, при этом внутреннее построение ИБП существенно меняется. Два последних усовершенствования применены в ИБП серии Synthesis фирмы Chloride, отличающихся уменьшенным объемом и массой.
Поскольку электронная начинка ИБП становится все сложнее, значительную долю их внутреннего объема теперь занимают процессорные платы. Для радикального уменьшения суммарной площади плат и изоляции их от вредных воздействий электромагнитных полей и теплового излучения используют электронные компоненты для так называемой технологии поверхностного монтажа (Surface Mounted Devices — SMD) — той самой, которую давно применяют в производстве компьютеров. Для защиты электронных и электротехнических компонентов имеются специальные внутренние экраны.
***
Со временем серьезный системный подход к проектированию материальной базы предприятия дает значительную экономию не только благодаря увеличению срока службы всех компонентов "интегрированного интеллектуального" здания, но и за счет сокращения расходов на электроэнергию и текущее обслуживание. Использование централизованных систем бесперебойного питания в пересчете на стоимость одного рабочего места дешевле, чем использование маломощных ИБП для рабочих станций и даже ИБП для серверных комнат. Однако, чтобы оценить это, нужно учесть все факторы установки таких систем.
Предположим, что предприятие свое помещение арендует. Тогда нет никакого смысла разворачивать дорогостоящую систему централизованного питания. Если через пять лет руководство предприятия не намерено заниматься тем же, чем занимается сегодня, то даже ИБП для серверных комнат обзаводиться нецелесообразно. Но если оно рассчитывает на то, что производство будет держаться на плаву долгие годы и решило оснастить принадлежащее им здание системой бесперебойного питания, то для выбора такой системы нужно воспользоваться услугами специализированных фирм. Сейчас их немало и в России. От этих же фирм можно получить информацию о так называемых системах гарантированного электропитания, в которые включены дизельные электрогенераторы и прочие, более экзотические источники энергии.
Нам же осталось рассмотреть лишь методы управления ИБП, что мы и сделаем в одном из следующих номеров нашего журнала
[ http://www.ccc.ru/magazine/depot/97_07/read.html?0502.htm]Тематики
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > ИБП для централизованных систем питания
14 находиться
•The camera can be contained in an artificial satellite or positioned on the moon or a planet.
•Such a fan is to be found in each room at the point where...
•The screw is situated (or located) at the rear of the clamp.
•The lactose carrier resides in the membrane.
•The transform fault occurs between the ends of the boundary.
•This point lies in a two-phase region of the phase diagram.
•This electron pair is localized within the central internuclear region.
•These points occur in the cubic element.
•The amount of water present as vapour in the atmosphere is...
•The negative electrons should spend more time between the nuclei than in other regions.
•If the observer is stationed above the equator,...
•The space in which the electron finds itself at the moment...
* * *Находиться - to be, to be found; to be located, to be situated (размещаться)Русско-английский научно-технический словарь переводчика > находиться
15 дифференциальный манометр
дифференциальный манометр
дифманометр
Манометр для измерения разности двух давлений.
Примечание
Дифманометр с верхним пределом измерения не более 40000 Па (4000 кгс/м2) называется микроманометром.
[ГОСТ 8.271-77]
дифференциальный манометр
-
[Лугинский Я. Н. и др. Англо-русский словарь по электротехнике и электроэнергетике. 2-е издание - М.: РУССО, 1995 - 616 с.]EN
differential-pressure gage
(engineering) Apparatus to measure pressure differences between two points in a system; it can be a pressured liquid column balanced by a pressured liquid reservoir, a formed metallic pressure element with opposing force, or an electrical-electronic gage (such as strain, thermal-conductivity, or ionization).
[ http://www.answers.com/topic/differential-pressure-gage#ixzz1gzzibWaQ]Малые значения дифференциального давления могут измеряться приборами на основе мембран и сильфонов.
Манометры дифференциальные сильфонные показывающие типа ДСП-160 нашли широкое применение на территории СНГ. Принцип их действия основан на деформации двух автономных сильфонных блоков, находящихся под воздействием «плюсового» и «минусового» давления. Эти деформации преобразовываются в перемещение указательной стрелки прибора. Перемещение стрелки осуществляется до установления равновесия между «плюсовым» сильфоном, с одной стороны, и «минусовым» и цилиндрической пружиной - с другой.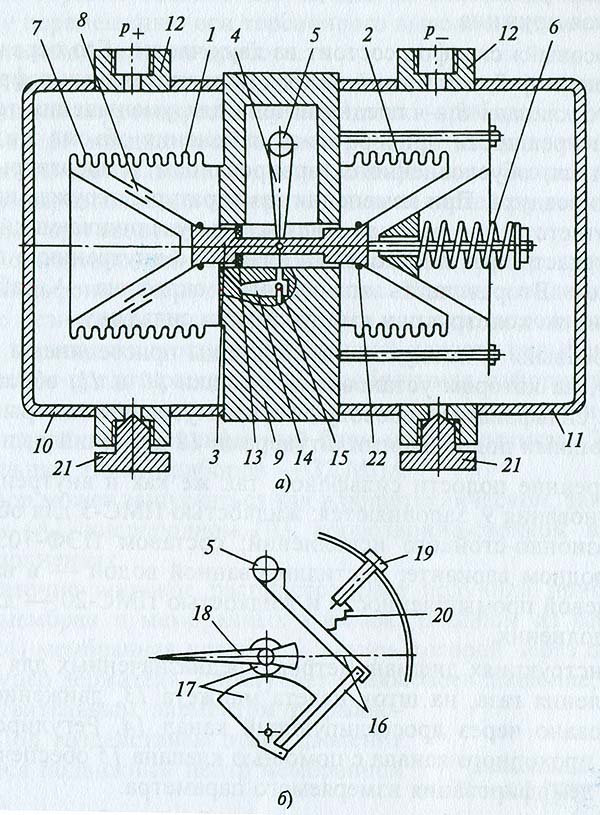
Рис. 2.23Дифференциальный сильфонный манометр:
а – схема привода стрелки;
б – блок первичного преобразования;
1 – «плюсовый» сильфон;
2 – «минусовый» сильфон;
3 – шток;
4 – рычаг;
5 – торсионный вывод;
6 – цилиндрическая пружина;
7 – компенсатор;
8 – плоскостный клапан;
9 – основание;
10 и 11 – крышки;
12 – подводящий штуцер;
13 – манжета;
14 – дросселирующий канал;
15 – клапан;
16 – рычажная система;
17 – трибко-секторный механизм;
18 – стрелка;
19 – регулировочный винт;
20 – натяжная пружина;
21 – пробка;
22 – уплотнительное резиновое кольцо«Плюсовый» 1 и «минусовый» 2 сильфоны (рис. Рис. 2.23, б) соединены между собой штоком 3, функционально связанным с рычагом 4, который, в свою очередь, неподвижно закреплен на оси торсионного вывода 5. К концу штока на выходе «минусового» сильфона присоединена цилиндрическая пружина 6, закрепленная нижним основанием на компенсаторе 7 и работающая на растяжение. Каждому номинальному перепаду давления соответствует определенная пружина.
«Плюсовый» сильфон состоит из двух частей. Его первая часть (компенсатор 7, состоящий из трех дополнительных гофр и плоскостных клапанов 8) предназначена для уменьшения температурной погрешности прибора из-за изменения объема жидкости-наполнителя, обусловленного варьированием температуры окружающего воздуха. При изменении температуры окружающей среды и соответственно рабочей жидкости ее увеличивающийся объем перетекает через плоскостный клапан во внутреннюю полость сильфонов. Вторая часть «плюсового» сильфона рабочая и идентична по конструкции «минусовому» сильфону.
«Плюсовый» и «минусовый» сильфоны присоединены к основанию 9, на котором установлены крышки 10 и 11, образующие вместе с сильфонами «плюсовую» и «минусовую» камеры с соответствующими подводящими штуцерами 12 давления р + и рВнутренние объемы сильфонов, так же как и внутренняя полость основания 9, заполняются: жидкостью ПМС-5 для обычного и коррозионно-стойкого исполнений; составом ПЭФ-703110 – в кислородном варианте; дистиллированной водой – в варианте для пищевой промышленности и жидкостью ПМС-20 – для газового исполнения.
В конструкциях дифманометров, предназначенных для измерения давления газа, на шток одета манжета 13, движение среды организовано через дросселирующий канал 14. Регулированием размера проходного канала с помощью клапана 15 обеспечивается степень демпфирования измеряемого параметра.
Дифманометр работает следующим образом. Среды «плюсового» и «минусового» давления поступают через подводящие штуцеры в «плюсовую» и «минусовую» камеры соответственно. «Плюсовое» давление в большей степени воздействует на сильфон 1, сжимая его. Это приводит к перетоку находящейся внутри жидкости в «минусовый» сильфон, который растягивается и разжимает цилиндрическую пружину. Такая динамика происходит до уравновешивания сил взаимодействия между «плюсовым» сильфоном и парой – «минусовый» сильфон – цилиндрическая пружина. Мерой деформации сильфонов и их упругого взаимодействия служит перемещение штока, которое передается на рычаг и соответственно на ось торсионного вывода. На этой оси (рис. 2.23,а) закреплена рычажная система 16, обеспечивающая передачу вращения оси торсионного вывода к трибко-секторному механизму 17 и стрелке 18. Таким образом, воздействие на один из сильфонов приводит к угловому перемещению оси торсионного вывода и затем к повороту указательной стрелки прибора.
Регулировочным винтом 19 с помощью натяжной пружины 20 производится корректировка нулевой точки прибора.
Пробки 21 предназначены для продувки импульсных линий, промывки измерительных полостей сильфонного блока, слива рабочей среды, заполнения измерительных полостей разделительной жидкостью при вводе прибора в работу.
При односторонней перегрузке одной из камер происходит сжатие сильфона и перемещение штока. Клапан в виде уплотнительного резинового кольца 22 садится в гнездо основания, перекрывает переток жидкости из внутренней полости сильфона, и таким образом предотвращается его необратимая деформация. При непродолжительных перегрузках разность «плюсового» и «минусового» давления на сильфонный блок может достигать 25 МПа, а в отдельных типах приборов не превышать 32 МПа.
прибор может выпускаться как в общетеническом, так и в аммиачном (А), кислородном (К), коррозионно-стойком-пищевом (Пп) исполнениях.
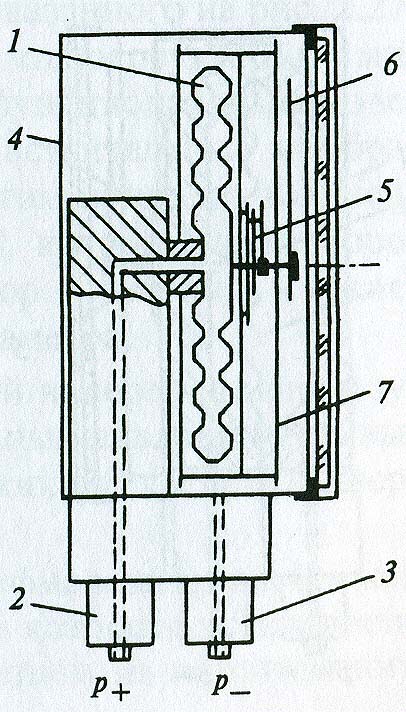
Рис. 2.24Показывающий дифференциальный манометр на основе мембранной коробки:
1 – мембранная коробка;
2 – держатель «плюсового» давления;
3 – держатель «минусового» давления;
4 – корпус;
5 – передаточный механизм;
6 – стрелка;
7 – циферблаДостаточно широкое распространение получили приборы на основе мембран и мембранных коробок. В одном из вариантов (рис. 2.24) мембранная коробка 1, внутрь которой через подводящий штуцер держателя 2 поступает «плюсовое» давление, является чувствительным элементом дифманометра. Под воздействием этого давления смещается подвижный центр мембранной коробки.
«Минусовое» давление через подводящий штуцер держателя 3 подается внутрь герметичного корпуса 4 прибора и воздействует на мембранную коробку снаружи, создавая противодействие перемещению ее подвижного центра. Таким образом «плюсовое» и «минусовое» давления уравновешивают друг друга, а перемещение подвижного центра мембранной коробки свидетельствует о величине разностного – дифференциального давления. Этот сдвиг через передаточный механизм передается на указательную стрелку 6, которая на шкале циферблата 7 показывает измеряемое дифференциальное давление.
Диапазон измеряемого давления определяется свойствами мембран и ограничивается, как правило, в пределах от 0 до 0,4…40 кПа. При этом класс точности может составлять 1,5; 1,0; 0,6; 0,4, а в некоторых приборах 0,25.
Обязательная конструктивная герметичность корпуса определяет высокую защищенность от внешних воздействий и определяется в основном уровнем IP66.
В качестве материала для чувствительных элементов приборов используется бериллиевая и другие бронзы, а также нержавеющая сталь, для штуцеров, передаточных механизмов – медные сплавы, коррозионно-стойкие сплавы, включая нержавеющую сталь.
Приборы могут изготавливаться в корпусах малых (63 мм), средних (100 мм), и больших (160 мм) диаметров.
Мембранные показывающие дифференциальные манометры, как и приборы с мембранными коробками, используются для измерения малых значений дифференциального давления. Отличительная особенность – устойчивая работа при высоком статическом давлении.
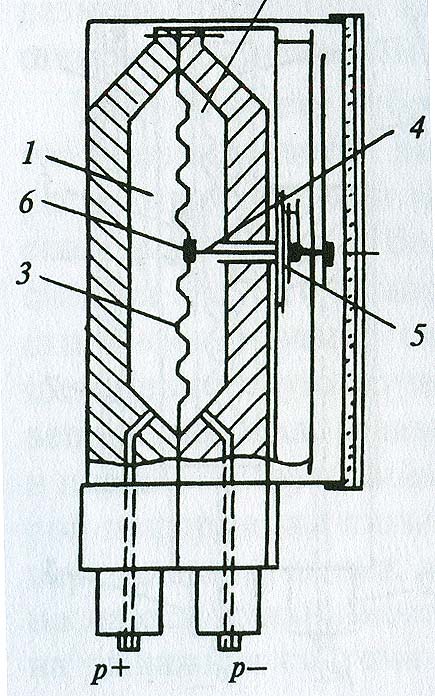
Рис. 2.25Мембранные показывающие дифференциальные манометры с вертикальной мембраной:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – чувствительная гофрированная мембрана;
4 – передающий шток;
5 – передаточный механизм;
6 – предохранительный клапанДифманометр с вертикальной мембраной (Рис. 2.25) состоит из «плюсовой» 1 и «минусовой» 2 рабочих камер, разделенных чувствительной гофрированной мембраной 3. Под воздействием давления мембрана деформируется, в результате чего перемещается ее центр вместе с закрепленным на нем передающим штоком 4. Линейное смещение штока в передаточном механизме 5 преобразуется в осевое вращение трибки, и соответственно указательной стрелки, отсчитывающей на шкале прибора измеряемое давление.
Для сохранения работоспособности чувствительной гофрированной мембраны при превышении максимального допустимого статического давления предусмотрен открывающийся предохранительный клапан 6. Причем конструкции этих клапанов могут быть различны. Соответственно такие приборы не могут использоваться, когда не допускается контакт сред из «плюсовой» и «минусовой» камер.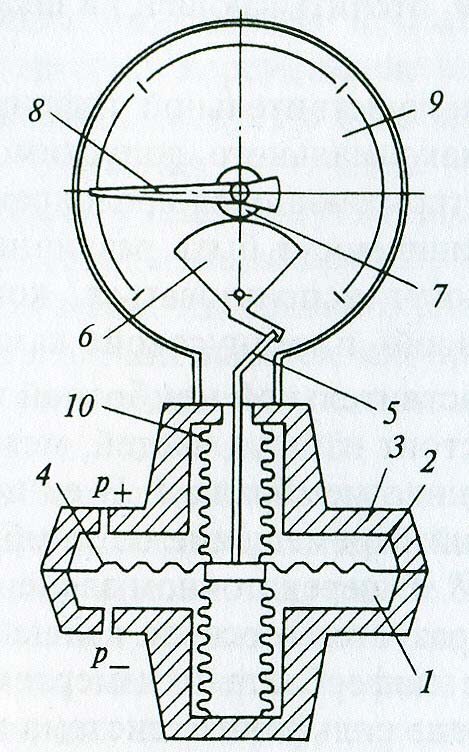
Рис. 2.26Мембранный показывающий дифференциальный манометр с горизонтальной мембраной:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – входной блок;
4 - чувствительная гофрированная мембрана;
5 – толкатель;
6 – сектор;
7 – трибка;
8 – стрелка;
9 – циферблат;
10 – разделительный сильфонДифманометр с горизонтальной чувствительной мембраной показан на рис. 2.26. Входной блок 3 состоит из двух частей, между которыми устанавливается гофрированная мембрана 4. В ее центре закреплен толкатель 5, передающий перемещение от мембраны, через сектор 6, трибку 7 к стрелке 8. В этом передаточном звене линейное перемещение толкателя преобразуется в осевое вращение стрелки 8, отслеживающей на шкале циферблата 9 измеряемое давление. В этой конструкции применена сильфонная система вывода толкателя из зоны рабочего давления. Разделительный сильфон 10 своим основанием герметично закрепляется на центре чувствительной мембраны, а верхней частью также герметично прикрепляется к входному блоку. Такая конструкция исключает контакт измеряемой и окружающей сред.
Конструкция входного блока предусматривает возможность промывки или продувки «плюсовой» и «минусовой» камер и обеспечивает применение таких приборов для работы даже в условиях загрязненных рабочих сред.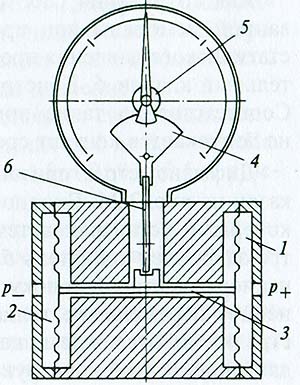
Рис. 2.27Мембранный двухкамерный показывающий дифманометр:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – передающий шток;
4 – сектор;
5 – трибка;
6 – коромыслоДвухкамерная система измерения дифференциального давления применена в конструкции прибора, показанного на рис. 2.27. Измеряемые потоки среды направляются в «плюсовую» 1 и «минусовую» 2 рабочие камеры, основными функциональными элементами которых являются автономные чувствительные мембраны. Преобладание одного давления над другим приводит к линейному перемещению передающего штока 3, которое через коромысло 6 передается соответственно на сектор 4, трибку 5 и систему стрелочной индикации измеряемого параметра.
Дифманометры с двухкамерной системой измерения используются для измерения малых дифференциальных давлений при высоких статических нагрузках, вязких сред и сред с твердыми вкраплениями.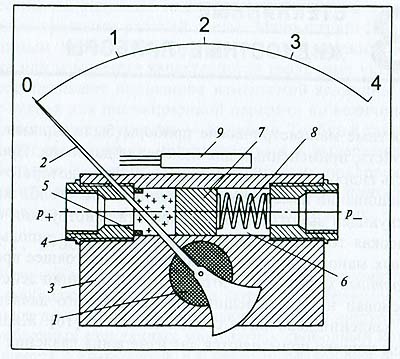
Рис. 2.28.Дифманометр с магнитным преобразователем:
1 – поворотный магнит;
2 – стрелка;
3 – корпус;
4 – магнитный поршень;
5 – фторопластовый сальник;
6 – рабочий канал;
7 – пробка;
8 – диапазонная пружина;
9 – блок электроконтактовПринципиально иной показывающий дифманометр изображен на рис. 2.28. Поворотный магнит 1, на торце которого установлена стрелка 2, размещен в корпусе 3, выполненном из немагнитного металла. Магнитный поршень, уплотненный фторопластовым сальником 5, может передвигаться в рабочем канале 6. Магнитный поршень 4 со стороны «минусового» давления подпирает пробка 7, в свою очередь поджимаемая диапазонной пружиной 8.
Среда «плюсового» давления через соответствующий подводящий штуцер воздействует на магнитный поршень и сдвигает его вместе с пробкой 7 по каналу 6 до уравновешивания такого смещения противодействующими силами – «минусовым» давлением и диапазонной пружиной. Движение магнитного поршня приводит к осевому вращению поворотного магнита и соответственно указательной стрелки. Такой сдвиг пропорционален перемещению стрелки. Полное согласование достигается подбором упругих характеристик диапазонной пружины.
В дифманометре с магнитным преобразователем предусмотрен блок 9, замыкающий и размыкающий соответствующие контакты при прохождении вблизи его магнитного поршня.
Приборы с магнитным преобразователем устойчивы к воздействию статического давления (до 10 МПа). Они обеспечивают относительно невысокую погрешность (примерно 2 %) в диапазоне функционирования до 0,4 Мпа и используются для измерения давления воздуха, газов, различных жидкостей.[ http://jumas.ru/index.php?area=1&p=static&page=razdel_2_3_2]
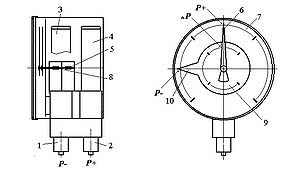
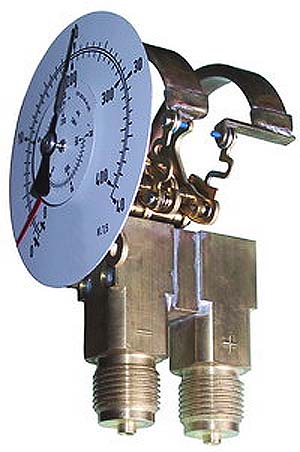
Показывающий дифференциальный манометр на основе трубчатой пружины1 и 2 – держатели;
3 и 4 – трубчатые пружины;
5 и 8 – трибки;
6 – стрелка «плюсового» давления;
7 и 9 – шкалы избыточного давления;
10 – стрелка «минусового» давленияВ приборах такого типа на автономных держателях 1 и 2, соединенных вместе, установлены трубчатые пружины. Каждый держатель вместе с трубчатым чувствительным элементом образовывают автономные измерительные каналы. Среда «плюсового» давления поступает через входной штуцер держателя 2 в трубку 4, деформирует ее овал, в результате чего перемещается наконечник трубки и это перемещение через соответствующий зубчатый сектор передается на трибку 5. Эта трибка соответственно приводит к отклонению указательной стрелки 6, которая показывает на шкале 7 значение «плюсового» избыточного давления.
«Минусовое» давление посредством держателя 1, трубчатой пружины 3, трибки 8 приводит к перемещению циферблата 9, объединенного со стрелкой 10, которая на шкале 7 отслеживает значение измеряемого параметра.Дифференциальные манометры (далее – дифманометры), как отмечалось в п.1.3, являются названием отнесенным в нашей стране к показывающим приборам. (Устройства, обеспечивающие электрический выходной сигнал, пропорциональный измеряемому дифференциальному давлению имеют название измерительных преобразователей разности давлений). Хотя отдельные производители, а также некоторые специалисты-эксплуатанционщики измерительные преобразователи разности давлений также называют дифманометрами.
Дифманометры нашли основное применение в технологических процессах для измерения, контроля, регистрации и регулирования следующих параметров:
· расхода различных жидких, газообразных и парообразных сред по перепаду давления на разного рода сужающих устройствах (стандартных диафрагмах, соплах, включая сопла Вентури) и дополнительно вводимых в поток гидро- и аэродинамических сопротивлениях, например на преобразователях типа Annubar или на нестандартных гидро- и аэродинамических препятствиях;
· перепада - разности давления, вакуумметрических, избыточных, в двух точках технологического цикла, включая потери на фильтрах систем вентиляции и кондиционирования воздуха;
· уровня жидких сред по величине гидростатического столба.
Согласно ГОСТ 18140–84/23/, предельные номинальные перепады давления дифманометров-расходомеров, верхние пределы или сумма абсолютных значений верхних пределов измерений дифманометров-перепадомеров должны приниматься из следующего ряда:
10; 16; 25; 40; 63; 100; 160; 250; 400; 630 Па;
1; 1,6; 2,5; 4; 6,3; 10; 16; 25; 40; 63; 100; 160; 250; 400; 630 кПа;
1; 1,6; 2,5; 4; 6,3 МПа.
У дифманометров-расходомеров верхние пределы измерений выбираются из ряда, определяемого выражением:
А = а × 10n, (2.7)
где а – одно из чисел следующего ряда: 1; 1,25; 1,6; 2,0; 2,5; 3,2; 4; 5; 6,3; 8; n – целое (положительное или отрицательное) число или нуль.
Верхние пределы измерений или сумма абсолютных значений верхних пределов измерений дифманометров-уровнемеров следует выбирать и ряда:
0,25; 0,4; 0,63; 1,0; 1,6; 2,5; 4,0; 6,3; 10; 16; 25; 40; 63; 100 и 160 метров.
Одной из важных характеристик дифманометров является предельно допустимое рабочее избыточное давление, т. е. избыточное давление, которое могут выдержать рабочие каналы без необратимой деформации чувствительных элементов. Такое значение параметра принимается из следующего ряда:
25; 40; 63; 100; 160; 250; 400 и 630 кПа;
1; 1,6; 2,5; 4; 6,3; 10; 16; 25; 32; 40 и 63 МПа.
Нижние пределы измерений дифманометров-расходо-меров из-за неустойчивости работы стандартных сужающих устройств при малых Числах Рейнольдса измеряемого потока не должны превышать 30 % шкалы прибора. У преобразователей Annubar этот предел не превышает 10 % при сохранении объявленного класса точности (1,0).
Классы точности дифманометров принимаются из ряда: 0,25; 0,5; 1,0; 1,5.
Дифманометры должны иметь линейную шкалу при измерении уровня или перепада, линейную или квадратичную – при измерении расхода.
Дифманометры могут иметь условные обозначения, предложенные в методике п.1.4. Указываются модель прибора, причем на первом месте в обозначении фиксируется измеряемый параметр – тип измерителя (дифманометр), затем – принцип измерения и функция, предельный номинальный перепад, избыточное рабочее давление, класс точности. Например, дифманометр сильфонный показывающий в корпусе диаметром 160 мм, на предельный номинальный перепад давления 630 кПа, с рабочим избыточным давлением 32 МПа, класса точности 1,5 обозначается как
ДСП 160 (0…630 кПа)-32 МПа-1,5.
После этого допускается указывать дополнительные обозначения, например исполнение по «IP», измеряемой среде, присоединительным линиям и т. д.
Специфика измерения дифференциального давления обусловливает наличие в дифманометрах устройств продувки импульсных линий без необходимости демонтажа прибора или его узлов.
При испытаниях, а также в нормальных условиях отечественные дифманометры, согласно требований производителя, должны обеспечивать заданные метрологические характеристики после выдержки не менее 6-ти часов при температуре окружающей среды:
20 ± 2 или 23 ± 2 оС – для приборов классов точности 0,5; 0,6 и 1;
20 ± 5 или 23 ± 5 оС – для приборов класса точности 1,5.
Современные конструкции из-за снижения металлоемкости и совершенствования преобразователей позволяют сокращать время температурной адаптации у некоторых моделей до нескольких десятков минут.
Конкретная температура приведена в ТУ на измеритель и должна регистрироваться в техническом описании или паспорте на прибор.
Дифманометры, не защищенные от одностороннего воздействия, должны выдерживать перегрузку со стороны среды «плюсового» давления, превышающую предельные номинальные перепады на 10…50 %. «Плюсовым», в противовес «минусовому», называют большее из двух давлений среды, поступающей на вход дифференциального манометра.
Конструкции, у которых предусмотрены односторонние перегрузки, должны выдерживать десятикратные, стократные или двухсот пятидесятикратные односторонние перегрузки/23/.
Показывающие дифференциальные манометры на основе трубчатой пружины находят широкое применение для визуализации расхода различных сред, гидродинамических потерь в системах теплового отопления.
Дифференциальное давление, т. е. разность давлений р отсчитывается стрелкой на шкале циферблата.
Дифманометры такого типа, исходя из особенностей трубчатых пружин, обеспечивают работоспособность в промышленных условиях в диапазоне от 0 до 100 МПа.[ http://jumas.ru/index.php?area=1&p=static&page=razdel2_2_4]
Тематики
Синонимы
EN
- differential gauge pressure
- differential manometer
- differential pressure gage
- differential pressure indicator
- differential-pressure gage
DE
FR
Русско-немецкий словарь нормативно-технической терминологии > дифференциальный манометр
16 дифференциальный манометр
- differential-pressure gage
- differential pressure indicator
- differential pressure gage
- differential manometer
- differential gauge pressure
дифференциальный манометр
дифманометр
Манометр для измерения разности двух давлений.
Примечание
Дифманометр с верхним пределом измерения не более 40000 Па (4000 кгс/м2) называется микроманометром.
[ГОСТ 8.271-77]
дифференциальный манометр
-
[Лугинский Я. Н. и др. Англо-русский словарь по электротехнике и электроэнергетике. 2-е издание - М.: РУССО, 1995 - 616 с.]EN
differential-pressure gage
(engineering) Apparatus to measure pressure differences between two points in a system; it can be a pressured liquid column balanced by a pressured liquid reservoir, a formed metallic pressure element with opposing force, or an electrical-electronic gage (such as strain, thermal-conductivity, or ionization).
[ http://www.answers.com/topic/differential-pressure-gage#ixzz1gzzibWaQ]Малые значения дифференциального давления могут измеряться приборами на основе мембран и сильфонов.
Манометры дифференциальные сильфонные показывающие типа ДСП-160 нашли широкое применение на территории СНГ. Принцип их действия основан на деформации двух автономных сильфонных блоков, находящихся под воздействием «плюсового» и «минусового» давления. Эти деформации преобразовываются в перемещение указательной стрелки прибора. Перемещение стрелки осуществляется до установления равновесия между «плюсовым» сильфоном, с одной стороны, и «минусовым» и цилиндрической пружиной - с другой.
Рис. 2.23Дифференциальный сильфонный манометр:
а – схема привода стрелки;
б – блок первичного преобразования;
1 – «плюсовый» сильфон;
2 – «минусовый» сильфон;
3 – шток;
4 – рычаг;
5 – торсионный вывод;
6 – цилиндрическая пружина;
7 – компенсатор;
8 – плоскостный клапан;
9 – основание;
10 и 11 – крышки;
12 – подводящий штуцер;
13 – манжета;
14 – дросселирующий канал;
15 – клапан;
16 – рычажная система;
17 – трибко-секторный механизм;
18 – стрелка;
19 – регулировочный винт;
20 – натяжная пружина;
21 – пробка;
22 – уплотнительное резиновое кольцо«Плюсовый» 1 и «минусовый» 2 сильфоны (рис. Рис. 2.23, б) соединены между собой штоком 3, функционально связанным с рычагом 4, который, в свою очередь, неподвижно закреплен на оси торсионного вывода 5. К концу штока на выходе «минусового» сильфона присоединена цилиндрическая пружина 6, закрепленная нижним основанием на компенсаторе 7 и работающая на растяжение. Каждому номинальному перепаду давления соответствует определенная пружина.
«Плюсовый» сильфон состоит из двух частей. Его первая часть (компенсатор 7, состоящий из трех дополнительных гофр и плоскостных клапанов 8) предназначена для уменьшения температурной погрешности прибора из-за изменения объема жидкости-наполнителя, обусловленного варьированием температуры окружающего воздуха. При изменении температуры окружающей среды и соответственно рабочей жидкости ее увеличивающийся объем перетекает через плоскостный клапан во внутреннюю полость сильфонов. Вторая часть «плюсового» сильфона рабочая и идентична по конструкции «минусовому» сильфону.
«Плюсовый» и «минусовый» сильфоны присоединены к основанию 9, на котором установлены крышки 10 и 11, образующие вместе с сильфонами «плюсовую» и «минусовую» камеры с соответствующими подводящими штуцерами 12 давления р + и рВнутренние объемы сильфонов, так же как и внутренняя полость основания 9, заполняются: жидкостью ПМС-5 для обычного и коррозионно-стойкого исполнений; составом ПЭФ-703110 – в кислородном варианте; дистиллированной водой – в варианте для пищевой промышленности и жидкостью ПМС-20 – для газового исполнения.
В конструкциях дифманометров, предназначенных для измерения давления газа, на шток одета манжета 13, движение среды организовано через дросселирующий канал 14. Регулированием размера проходного канала с помощью клапана 15 обеспечивается степень демпфирования измеряемого параметра.
Дифманометр работает следующим образом. Среды «плюсового» и «минусового» давления поступают через подводящие штуцеры в «плюсовую» и «минусовую» камеры соответственно. «Плюсовое» давление в большей степени воздействует на сильфон 1, сжимая его. Это приводит к перетоку находящейся внутри жидкости в «минусовый» сильфон, который растягивается и разжимает цилиндрическую пружину. Такая динамика происходит до уравновешивания сил взаимодействия между «плюсовым» сильфоном и парой – «минусовый» сильфон – цилиндрическая пружина. Мерой деформации сильфонов и их упругого взаимодействия служит перемещение штока, которое передается на рычаг и соответственно на ось торсионного вывода. На этой оси (рис. 2.23,а) закреплена рычажная система 16, обеспечивающая передачу вращения оси торсионного вывода к трибко-секторному механизму 17 и стрелке 18. Таким образом, воздействие на один из сильфонов приводит к угловому перемещению оси торсионного вывода и затем к повороту указательной стрелки прибора.
Регулировочным винтом 19 с помощью натяжной пружины 20 производится корректировка нулевой точки прибора.
Пробки 21 предназначены для продувки импульсных линий, промывки измерительных полостей сильфонного блока, слива рабочей среды, заполнения измерительных полостей разделительной жидкостью при вводе прибора в работу.
При односторонней перегрузке одной из камер происходит сжатие сильфона и перемещение штока. Клапан в виде уплотнительного резинового кольца 22 садится в гнездо основания, перекрывает переток жидкости из внутренней полости сильфона, и таким образом предотвращается его необратимая деформация. При непродолжительных перегрузках разность «плюсового» и «минусового» давления на сильфонный блок может достигать 25 МПа, а в отдельных типах приборов не превышать 32 МПа.
прибор может выпускаться как в общетеническом, так и в аммиачном (А), кислородном (К), коррозионно-стойком-пищевом (Пп) исполнениях.
Рис. 2.24Показывающий дифференциальный манометр на основе мембранной коробки:
1 – мембранная коробка;
2 – держатель «плюсового» давления;
3 – держатель «минусового» давления;
4 – корпус;
5 – передаточный механизм;
6 – стрелка;
7 – циферблаДостаточно широкое распространение получили приборы на основе мембран и мембранных коробок. В одном из вариантов (рис. 2.24) мембранная коробка 1, внутрь которой через подводящий штуцер держателя 2 поступает «плюсовое» давление, является чувствительным элементом дифманометра. Под воздействием этого давления смещается подвижный центр мембранной коробки.
«Минусовое» давление через подводящий штуцер держателя 3 подается внутрь герметичного корпуса 4 прибора и воздействует на мембранную коробку снаружи, создавая противодействие перемещению ее подвижного центра. Таким образом «плюсовое» и «минусовое» давления уравновешивают друг друга, а перемещение подвижного центра мембранной коробки свидетельствует о величине разностного – дифференциального давления. Этот сдвиг через передаточный механизм передается на указательную стрелку 6, которая на шкале циферблата 7 показывает измеряемое дифференциальное давление.
Диапазон измеряемого давления определяется свойствами мембран и ограничивается, как правило, в пределах от 0 до 0,4…40 кПа. При этом класс точности может составлять 1,5; 1,0; 0,6; 0,4, а в некоторых приборах 0,25.
Обязательная конструктивная герметичность корпуса определяет высокую защищенность от внешних воздействий и определяется в основном уровнем IP66.
В качестве материала для чувствительных элементов приборов используется бериллиевая и другие бронзы, а также нержавеющая сталь, для штуцеров, передаточных механизмов – медные сплавы, коррозионно-стойкие сплавы, включая нержавеющую сталь.
Приборы могут изготавливаться в корпусах малых (63 мм), средних (100 мм), и больших (160 мм) диаметров.
Мембранные показывающие дифференциальные манометры, как и приборы с мембранными коробками, используются для измерения малых значений дифференциального давления. Отличительная особенность – устойчивая работа при высоком статическом давлении.
Рис. 2.25Мембранные показывающие дифференциальные манометры с вертикальной мембраной:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – чувствительная гофрированная мембрана;
4 – передающий шток;
5 – передаточный механизм;
6 – предохранительный клапанДифманометр с вертикальной мембраной (Рис. 2.25) состоит из «плюсовой» 1 и «минусовой» 2 рабочих камер, разделенных чувствительной гофрированной мембраной 3. Под воздействием давления мембрана деформируется, в результате чего перемещается ее центр вместе с закрепленным на нем передающим штоком 4. Линейное смещение штока в передаточном механизме 5 преобразуется в осевое вращение трибки, и соответственно указательной стрелки, отсчитывающей на шкале прибора измеряемое давление.
Для сохранения работоспособности чувствительной гофрированной мембраны при превышении максимального допустимого статического давления предусмотрен открывающийся предохранительный клапан 6. Причем конструкции этих клапанов могут быть различны. Соответственно такие приборы не могут использоваться, когда не допускается контакт сред из «плюсовой» и «минусовой» камер.
Рис. 2.26Мембранный показывающий дифференциальный манометр с горизонтальной мембраной:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – входной блок;
4 - чувствительная гофрированная мембрана;
5 – толкатель;
6 – сектор;
7 – трибка;
8 – стрелка;
9 – циферблат;
10 – разделительный сильфонДифманометр с горизонтальной чувствительной мембраной показан на рис. 2.26. Входной блок 3 состоит из двух частей, между которыми устанавливается гофрированная мембрана 4. В ее центре закреплен толкатель 5, передающий перемещение от мембраны, через сектор 6, трибку 7 к стрелке 8. В этом передаточном звене линейное перемещение толкателя преобразуется в осевое вращение стрелки 8, отслеживающей на шкале циферблата 9 измеряемое давление. В этой конструкции применена сильфонная система вывода толкателя из зоны рабочего давления. Разделительный сильфон 10 своим основанием герметично закрепляется на центре чувствительной мембраны, а верхней частью также герметично прикрепляется к входному блоку. Такая конструкция исключает контакт измеряемой и окружающей сред.
Конструкция входного блока предусматривает возможность промывки или продувки «плюсовой» и «минусовой» камер и обеспечивает применение таких приборов для работы даже в условиях загрязненных рабочих сред.
Рис. 2.27Мембранный двухкамерный показывающий дифманометр:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – передающий шток;
4 – сектор;
5 – трибка;
6 – коромыслоДвухкамерная система измерения дифференциального давления применена в конструкции прибора, показанного на рис. 2.27. Измеряемые потоки среды направляются в «плюсовую» 1 и «минусовую» 2 рабочие камеры, основными функциональными элементами которых являются автономные чувствительные мембраны. Преобладание одного давления над другим приводит к линейному перемещению передающего штока 3, которое через коромысло 6 передается соответственно на сектор 4, трибку 5 и систему стрелочной индикации измеряемого параметра.
Дифманометры с двухкамерной системой измерения используются для измерения малых дифференциальных давлений при высоких статических нагрузках, вязких сред и сред с твердыми вкраплениями.
Рис. 2.28.Дифманометр с магнитным преобразователем:
1 – поворотный магнит;
2 – стрелка;
3 – корпус;
4 – магнитный поршень;
5 – фторопластовый сальник;
6 – рабочий канал;
7 – пробка;
8 – диапазонная пружина;
9 – блок электроконтактовПринципиально иной показывающий дифманометр изображен на рис. 2.28. Поворотный магнит 1, на торце которого установлена стрелка 2, размещен в корпусе 3, выполненном из немагнитного металла. Магнитный поршень, уплотненный фторопластовым сальником 5, может передвигаться в рабочем канале 6. Магнитный поршень 4 со стороны «минусового» давления подпирает пробка 7, в свою очередь поджимаемая диапазонной пружиной 8.
Среда «плюсового» давления через соответствующий подводящий штуцер воздействует на магнитный поршень и сдвигает его вместе с пробкой 7 по каналу 6 до уравновешивания такого смещения противодействующими силами – «минусовым» давлением и диапазонной пружиной. Движение магнитного поршня приводит к осевому вращению поворотного магнита и соответственно указательной стрелки. Такой сдвиг пропорционален перемещению стрелки. Полное согласование достигается подбором упругих характеристик диапазонной пружины.
В дифманометре с магнитным преобразователем предусмотрен блок 9, замыкающий и размыкающий соответствующие контакты при прохождении вблизи его магнитного поршня.
Приборы с магнитным преобразователем устойчивы к воздействию статического давления (до 10 МПа). Они обеспечивают относительно невысокую погрешность (примерно 2 %) в диапазоне функционирования до 0,4 Мпа и используются для измерения давления воздуха, газов, различных жидкостей.[ http://jumas.ru/index.php?area=1&p=static&page=razdel_2_3_2]
Показывающий дифференциальный манометр на основе трубчатой пружины1 и 2 – держатели;
3 и 4 – трубчатые пружины;
5 и 8 – трибки;
6 – стрелка «плюсового» давления;
7 и 9 – шкалы избыточного давления;
10 – стрелка «минусового» давленияВ приборах такого типа на автономных держателях 1 и 2, соединенных вместе, установлены трубчатые пружины. Каждый держатель вместе с трубчатым чувствительным элементом образовывают автономные измерительные каналы. Среда «плюсового» давления поступает через входной штуцер держателя 2 в трубку 4, деформирует ее овал, в результате чего перемещается наконечник трубки и это перемещение через соответствующий зубчатый сектор передается на трибку 5. Эта трибка соответственно приводит к отклонению указательной стрелки 6, которая показывает на шкале 7 значение «плюсового» избыточного давления.
«Минусовое» давление посредством держателя 1, трубчатой пружины 3, трибки 8 приводит к перемещению циферблата 9, объединенного со стрелкой 10, которая на шкале 7 отслеживает значение измеряемого параметра.Дифференциальные манометры (далее – дифманометры), как отмечалось в п.1.3, являются названием отнесенным в нашей стране к показывающим приборам. (Устройства, обеспечивающие электрический выходной сигнал, пропорциональный измеряемому дифференциальному давлению имеют название измерительных преобразователей разности давлений). Хотя отдельные производители, а также некоторые специалисты-эксплуатанционщики измерительные преобразователи разности давлений также называют дифманометрами.
Дифманометры нашли основное применение в технологических процессах для измерения, контроля, регистрации и регулирования следующих параметров:
· расхода различных жидких, газообразных и парообразных сред по перепаду давления на разного рода сужающих устройствах (стандартных диафрагмах, соплах, включая сопла Вентури) и дополнительно вводимых в поток гидро- и аэродинамических сопротивлениях, например на преобразователях типа Annubar или на нестандартных гидро- и аэродинамических препятствиях;
· перепада - разности давления, вакуумметрических, избыточных, в двух точках технологического цикла, включая потери на фильтрах систем вентиляции и кондиционирования воздуха;
· уровня жидких сред по величине гидростатического столба.
Согласно ГОСТ 18140–84/23/, предельные номинальные перепады давления дифманометров-расходомеров, верхние пределы или сумма абсолютных значений верхних пределов измерений дифманометров-перепадомеров должны приниматься из следующего ряда:
10; 16; 25; 40; 63; 100; 160; 250; 400; 630 Па;
1; 1,6; 2,5; 4; 6,3; 10; 16; 25; 40; 63; 100; 160; 250; 400; 630 кПа;
1; 1,6; 2,5; 4; 6,3 МПа.
У дифманометров-расходомеров верхние пределы измерений выбираются из ряда, определяемого выражением:
А = а × 10n, (2.7)
где а – одно из чисел следующего ряда: 1; 1,25; 1,6; 2,0; 2,5; 3,2; 4; 5; 6,3; 8; n – целое (положительное или отрицательное) число или нуль.
Верхние пределы измерений или сумма абсолютных значений верхних пределов измерений дифманометров-уровнемеров следует выбирать и ряда:
0,25; 0,4; 0,63; 1,0; 1,6; 2,5; 4,0; 6,3; 10; 16; 25; 40; 63; 100 и 160 метров.
Одной из важных характеристик дифманометров является предельно допустимое рабочее избыточное давление, т. е. избыточное давление, которое могут выдержать рабочие каналы без необратимой деформации чувствительных элементов. Такое значение параметра принимается из следующего ряда:
25; 40; 63; 100; 160; 250; 400 и 630 кПа;
1; 1,6; 2,5; 4; 6,3; 10; 16; 25; 32; 40 и 63 МПа.
Нижние пределы измерений дифманометров-расходо-меров из-за неустойчивости работы стандартных сужающих устройств при малых Числах Рейнольдса измеряемого потока не должны превышать 30 % шкалы прибора. У преобразователей Annubar этот предел не превышает 10 % при сохранении объявленного класса точности (1,0).
Классы точности дифманометров принимаются из ряда: 0,25; 0,5; 1,0; 1,5.
Дифманометры должны иметь линейную шкалу при измерении уровня или перепада, линейную или квадратичную – при измерении расхода.
Дифманометры могут иметь условные обозначения, предложенные в методике п.1.4. Указываются модель прибора, причем на первом месте в обозначении фиксируется измеряемый параметр – тип измерителя (дифманометр), затем – принцип измерения и функция, предельный номинальный перепад, избыточное рабочее давление, класс точности. Например, дифманометр сильфонный показывающий в корпусе диаметром 160 мм, на предельный номинальный перепад давления 630 кПа, с рабочим избыточным давлением 32 МПа, класса точности 1,5 обозначается как
ДСП 160 (0…630 кПа)-32 МПа-1,5.
После этого допускается указывать дополнительные обозначения, например исполнение по «IP», измеряемой среде, присоединительным линиям и т. д.
Специфика измерения дифференциального давления обусловливает наличие в дифманометрах устройств продувки импульсных линий без необходимости демонтажа прибора или его узлов.
При испытаниях, а также в нормальных условиях отечественные дифманометры, согласно требований производителя, должны обеспечивать заданные метрологические характеристики после выдержки не менее 6-ти часов при температуре окружающей среды:
20 ± 2 или 23 ± 2 оС – для приборов классов точности 0,5; 0,6 и 1;
20 ± 5 или 23 ± 5 оС – для приборов класса точности 1,5.
Современные конструкции из-за снижения металлоемкости и совершенствования преобразователей позволяют сокращать время температурной адаптации у некоторых моделей до нескольких десятков минут.
Конкретная температура приведена в ТУ на измеритель и должна регистрироваться в техническом описании или паспорте на прибор.
Дифманометры, не защищенные от одностороннего воздействия, должны выдерживать перегрузку со стороны среды «плюсового» давления, превышающую предельные номинальные перепады на 10…50 %. «Плюсовым», в противовес «минусовому», называют большее из двух давлений среды, поступающей на вход дифференциального манометра.
Конструкции, у которых предусмотрены односторонние перегрузки, должны выдерживать десятикратные, стократные или двухсот пятидесятикратные односторонние перегрузки/23/.
Показывающие дифференциальные манометры на основе трубчатой пружины находят широкое применение для визуализации расхода различных сред, гидродинамических потерь в системах теплового отопления.
Дифференциальное давление, т. е. разность давлений р отсчитывается стрелкой на шкале циферблата.
Дифманометры такого типа, исходя из особенностей трубчатых пружин, обеспечивают работоспособность в промышленных условиях в диапазоне от 0 до 100 МПа.[ http://jumas.ru/index.php?area=1&p=static&page=razdel2_2_4]
Тематики
Синонимы
EN
- differential gauge pressure
- differential manometer
- differential pressure gage
- differential pressure indicator
- differential-pressure gage
DE
FR
Русско-английский словарь нормативно-технической терминологии > дифференциальный манометр
17 дифференциальный манометр
дифференциальный манометр
дифманометр
Манометр для измерения разности двух давлений.
Примечание
Дифманометр с верхним пределом измерения не более 40000 Па (4000 кгс/м2) называется микроманометром.
[ГОСТ 8.271-77]
дифференциальный манометр
-
[Лугинский Я. Н. и др. Англо-русский словарь по электротехнике и электроэнергетике. 2-е издание - М.: РУССО, 1995 - 616 с.]EN
differential-pressure gage
(engineering) Apparatus to measure pressure differences between two points in a system; it can be a pressured liquid column balanced by a pressured liquid reservoir, a formed metallic pressure element with opposing force, or an electrical-electronic gage (such as strain, thermal-conductivity, or ionization).
[ http://www.answers.com/topic/differential-pressure-gage#ixzz1gzzibWaQ]Малые значения дифференциального давления могут измеряться приборами на основе мембран и сильфонов.
Манометры дифференциальные сильфонные показывающие типа ДСП-160 нашли широкое применение на территории СНГ. Принцип их действия основан на деформации двух автономных сильфонных блоков, находящихся под воздействием «плюсового» и «минусового» давления. Эти деформации преобразовываются в перемещение указательной стрелки прибора. Перемещение стрелки осуществляется до установления равновесия между «плюсовым» сильфоном, с одной стороны, и «минусовым» и цилиндрической пружиной - с другой.
Рис. 2.23Дифференциальный сильфонный манометр:
а – схема привода стрелки;
б – блок первичного преобразования;
1 – «плюсовый» сильфон;
2 – «минусовый» сильфон;
3 – шток;
4 – рычаг;
5 – торсионный вывод;
6 – цилиндрическая пружина;
7 – компенсатор;
8 – плоскостный клапан;
9 – основание;
10 и 11 – крышки;
12 – подводящий штуцер;
13 – манжета;
14 – дросселирующий канал;
15 – клапан;
16 – рычажная система;
17 – трибко-секторный механизм;
18 – стрелка;
19 – регулировочный винт;
20 – натяжная пружина;
21 – пробка;
22 – уплотнительное резиновое кольцо«Плюсовый» 1 и «минусовый» 2 сильфоны (рис. Рис. 2.23, б) соединены между собой штоком 3, функционально связанным с рычагом 4, который, в свою очередь, неподвижно закреплен на оси торсионного вывода 5. К концу штока на выходе «минусового» сильфона присоединена цилиндрическая пружина 6, закрепленная нижним основанием на компенсаторе 7 и работающая на растяжение. Каждому номинальному перепаду давления соответствует определенная пружина.
«Плюсовый» сильфон состоит из двух частей. Его первая часть (компенсатор 7, состоящий из трех дополнительных гофр и плоскостных клапанов 8) предназначена для уменьшения температурной погрешности прибора из-за изменения объема жидкости-наполнителя, обусловленного варьированием температуры окружающего воздуха. При изменении температуры окружающей среды и соответственно рабочей жидкости ее увеличивающийся объем перетекает через плоскостный клапан во внутреннюю полость сильфонов. Вторая часть «плюсового» сильфона рабочая и идентична по конструкции «минусовому» сильфону.
«Плюсовый» и «минусовый» сильфоны присоединены к основанию 9, на котором установлены крышки 10 и 11, образующие вместе с сильфонами «плюсовую» и «минусовую» камеры с соответствующими подводящими штуцерами 12 давления р + и рВнутренние объемы сильфонов, так же как и внутренняя полость основания 9, заполняются: жидкостью ПМС-5 для обычного и коррозионно-стойкого исполнений; составом ПЭФ-703110 – в кислородном варианте; дистиллированной водой – в варианте для пищевой промышленности и жидкостью ПМС-20 – для газового исполнения.
В конструкциях дифманометров, предназначенных для измерения давления газа, на шток одета манжета 13, движение среды организовано через дросселирующий канал 14. Регулированием размера проходного канала с помощью клапана 15 обеспечивается степень демпфирования измеряемого параметра.
Дифманометр работает следующим образом. Среды «плюсового» и «минусового» давления поступают через подводящие штуцеры в «плюсовую» и «минусовую» камеры соответственно. «Плюсовое» давление в большей степени воздействует на сильфон 1, сжимая его. Это приводит к перетоку находящейся внутри жидкости в «минусовый» сильфон, который растягивается и разжимает цилиндрическую пружину. Такая динамика происходит до уравновешивания сил взаимодействия между «плюсовым» сильфоном и парой – «минусовый» сильфон – цилиндрическая пружина. Мерой деформации сильфонов и их упругого взаимодействия служит перемещение штока, которое передается на рычаг и соответственно на ось торсионного вывода. На этой оси (рис. 2.23,а) закреплена рычажная система 16, обеспечивающая передачу вращения оси торсионного вывода к трибко-секторному механизму 17 и стрелке 18. Таким образом, воздействие на один из сильфонов приводит к угловому перемещению оси торсионного вывода и затем к повороту указательной стрелки прибора.
Регулировочным винтом 19 с помощью натяжной пружины 20 производится корректировка нулевой точки прибора.
Пробки 21 предназначены для продувки импульсных линий, промывки измерительных полостей сильфонного блока, слива рабочей среды, заполнения измерительных полостей разделительной жидкостью при вводе прибора в работу.
При односторонней перегрузке одной из камер происходит сжатие сильфона и перемещение штока. Клапан в виде уплотнительного резинового кольца 22 садится в гнездо основания, перекрывает переток жидкости из внутренней полости сильфона, и таким образом предотвращается его необратимая деформация. При непродолжительных перегрузках разность «плюсового» и «минусового» давления на сильфонный блок может достигать 25 МПа, а в отдельных типах приборов не превышать 32 МПа.
прибор может выпускаться как в общетеническом, так и в аммиачном (А), кислородном (К), коррозионно-стойком-пищевом (Пп) исполнениях.
Рис. 2.24Показывающий дифференциальный манометр на основе мембранной коробки:
1 – мембранная коробка;
2 – держатель «плюсового» давления;
3 – держатель «минусового» давления;
4 – корпус;
5 – передаточный механизм;
6 – стрелка;
7 – циферблаДостаточно широкое распространение получили приборы на основе мембран и мембранных коробок. В одном из вариантов (рис. 2.24) мембранная коробка 1, внутрь которой через подводящий штуцер держателя 2 поступает «плюсовое» давление, является чувствительным элементом дифманометра. Под воздействием этого давления смещается подвижный центр мембранной коробки.
«Минусовое» давление через подводящий штуцер держателя 3 подается внутрь герметичного корпуса 4 прибора и воздействует на мембранную коробку снаружи, создавая противодействие перемещению ее подвижного центра. Таким образом «плюсовое» и «минусовое» давления уравновешивают друг друга, а перемещение подвижного центра мембранной коробки свидетельствует о величине разностного – дифференциального давления. Этот сдвиг через передаточный механизм передается на указательную стрелку 6, которая на шкале циферблата 7 показывает измеряемое дифференциальное давление.
Диапазон измеряемого давления определяется свойствами мембран и ограничивается, как правило, в пределах от 0 до 0,4…40 кПа. При этом класс точности может составлять 1,5; 1,0; 0,6; 0,4, а в некоторых приборах 0,25.
Обязательная конструктивная герметичность корпуса определяет высокую защищенность от внешних воздействий и определяется в основном уровнем IP66.
В качестве материала для чувствительных элементов приборов используется бериллиевая и другие бронзы, а также нержавеющая сталь, для штуцеров, передаточных механизмов – медные сплавы, коррозионно-стойкие сплавы, включая нержавеющую сталь.
Приборы могут изготавливаться в корпусах малых (63 мм), средних (100 мм), и больших (160 мм) диаметров.
Мембранные показывающие дифференциальные манометры, как и приборы с мембранными коробками, используются для измерения малых значений дифференциального давления. Отличительная особенность – устойчивая работа при высоком статическом давлении.
Рис. 2.25Мембранные показывающие дифференциальные манометры с вертикальной мембраной:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – чувствительная гофрированная мембрана;
4 – передающий шток;
5 – передаточный механизм;
6 – предохранительный клапанДифманометр с вертикальной мембраной (Рис. 2.25) состоит из «плюсовой» 1 и «минусовой» 2 рабочих камер, разделенных чувствительной гофрированной мембраной 3. Под воздействием давления мембрана деформируется, в результате чего перемещается ее центр вместе с закрепленным на нем передающим штоком 4. Линейное смещение штока в передаточном механизме 5 преобразуется в осевое вращение трибки, и соответственно указательной стрелки, отсчитывающей на шкале прибора измеряемое давление.
Для сохранения работоспособности чувствительной гофрированной мембраны при превышении максимального допустимого статического давления предусмотрен открывающийся предохранительный клапан 6. Причем конструкции этих клапанов могут быть различны. Соответственно такие приборы не могут использоваться, когда не допускается контакт сред из «плюсовой» и «минусовой» камер.
Рис. 2.26Мембранный показывающий дифференциальный манометр с горизонтальной мембраной:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – входной блок;
4 - чувствительная гофрированная мембрана;
5 – толкатель;
6 – сектор;
7 – трибка;
8 – стрелка;
9 – циферблат;
10 – разделительный сильфонДифманометр с горизонтальной чувствительной мембраной показан на рис. 2.26. Входной блок 3 состоит из двух частей, между которыми устанавливается гофрированная мембрана 4. В ее центре закреплен толкатель 5, передающий перемещение от мембраны, через сектор 6, трибку 7 к стрелке 8. В этом передаточном звене линейное перемещение толкателя преобразуется в осевое вращение стрелки 8, отслеживающей на шкале циферблата 9 измеряемое давление. В этой конструкции применена сильфонная система вывода толкателя из зоны рабочего давления. Разделительный сильфон 10 своим основанием герметично закрепляется на центре чувствительной мембраны, а верхней частью также герметично прикрепляется к входному блоку. Такая конструкция исключает контакт измеряемой и окружающей сред.
Конструкция входного блока предусматривает возможность промывки или продувки «плюсовой» и «минусовой» камер и обеспечивает применение таких приборов для работы даже в условиях загрязненных рабочих сред.
Рис. 2.27Мембранный двухкамерный показывающий дифманометр:
1 – «плюсовая» камера;
2 – «минусовая» камера;
3 – передающий шток;
4 – сектор;
5 – трибка;
6 – коромыслоДвухкамерная система измерения дифференциального давления применена в конструкции прибора, показанного на рис. 2.27. Измеряемые потоки среды направляются в «плюсовую» 1 и «минусовую» 2 рабочие камеры, основными функциональными элементами которых являются автономные чувствительные мембраны. Преобладание одного давления над другим приводит к линейному перемещению передающего штока 3, которое через коромысло 6 передается соответственно на сектор 4, трибку 5 и систему стрелочной индикации измеряемого параметра.
Дифманометры с двухкамерной системой измерения используются для измерения малых дифференциальных давлений при высоких статических нагрузках, вязких сред и сред с твердыми вкраплениями.
Рис. 2.28.Дифманометр с магнитным преобразователем:
1 – поворотный магнит;
2 – стрелка;
3 – корпус;
4 – магнитный поршень;
5 – фторопластовый сальник;
6 – рабочий канал;
7 – пробка;
8 – диапазонная пружина;
9 – блок электроконтактовПринципиально иной показывающий дифманометр изображен на рис. 2.28. Поворотный магнит 1, на торце которого установлена стрелка 2, размещен в корпусе 3, выполненном из немагнитного металла. Магнитный поршень, уплотненный фторопластовым сальником 5, может передвигаться в рабочем канале 6. Магнитный поршень 4 со стороны «минусового» давления подпирает пробка 7, в свою очередь поджимаемая диапазонной пружиной 8.
Среда «плюсового» давления через соответствующий подводящий штуцер воздействует на магнитный поршень и сдвигает его вместе с пробкой 7 по каналу 6 до уравновешивания такого смещения противодействующими силами – «минусовым» давлением и диапазонной пружиной. Движение магнитного поршня приводит к осевому вращению поворотного магнита и соответственно указательной стрелки. Такой сдвиг пропорционален перемещению стрелки. Полное согласование достигается подбором упругих характеристик диапазонной пружины.
В дифманометре с магнитным преобразователем предусмотрен блок 9, замыкающий и размыкающий соответствующие контакты при прохождении вблизи его магнитного поршня.
Приборы с магнитным преобразователем устойчивы к воздействию статического давления (до 10 МПа). Они обеспечивают относительно невысокую погрешность (примерно 2 %) в диапазоне функционирования до 0,4 Мпа и используются для измерения давления воздуха, газов, различных жидкостей.[ http://jumas.ru/index.php?area=1&p=static&page=razdel_2_3_2]
Показывающий дифференциальный манометр на основе трубчатой пружины1 и 2 – держатели;
3 и 4 – трубчатые пружины;
5 и 8 – трибки;
6 – стрелка «плюсового» давления;
7 и 9 – шкалы избыточного давления;
10 – стрелка «минусового» давленияВ приборах такого типа на автономных держателях 1 и 2, соединенных вместе, установлены трубчатые пружины. Каждый держатель вместе с трубчатым чувствительным элементом образовывают автономные измерительные каналы. Среда «плюсового» давления поступает через входной штуцер держателя 2 в трубку 4, деформирует ее овал, в результате чего перемещается наконечник трубки и это перемещение через соответствующий зубчатый сектор передается на трибку 5. Эта трибка соответственно приводит к отклонению указательной стрелки 6, которая показывает на шкале 7 значение «плюсового» избыточного давления.
«Минусовое» давление посредством держателя 1, трубчатой пружины 3, трибки 8 приводит к перемещению циферблата 9, объединенного со стрелкой 10, которая на шкале 7 отслеживает значение измеряемого параметра.Дифференциальные манометры (далее – дифманометры), как отмечалось в п.1.3, являются названием отнесенным в нашей стране к показывающим приборам. (Устройства, обеспечивающие электрический выходной сигнал, пропорциональный измеряемому дифференциальному давлению имеют название измерительных преобразователей разности давлений). Хотя отдельные производители, а также некоторые специалисты-эксплуатанционщики измерительные преобразователи разности давлений также называют дифманометрами.
Дифманометры нашли основное применение в технологических процессах для измерения, контроля, регистрации и регулирования следующих параметров:
· расхода различных жидких, газообразных и парообразных сред по перепаду давления на разного рода сужающих устройствах (стандартных диафрагмах, соплах, включая сопла Вентури) и дополнительно вводимых в поток гидро- и аэродинамических сопротивлениях, например на преобразователях типа Annubar или на нестандартных гидро- и аэродинамических препятствиях;
· перепада - разности давления, вакуумметрических, избыточных, в двух точках технологического цикла, включая потери на фильтрах систем вентиляции и кондиционирования воздуха;
· уровня жидких сред по величине гидростатического столба.
Согласно ГОСТ 18140–84/23/, предельные номинальные перепады давления дифманометров-расходомеров, верхние пределы или сумма абсолютных значений верхних пределов измерений дифманометров-перепадомеров должны приниматься из следующего ряда:
10; 16; 25; 40; 63; 100; 160; 250; 400; 630 Па;
1; 1,6; 2,5; 4; 6,3; 10; 16; 25; 40; 63; 100; 160; 250; 400; 630 кПа;
1; 1,6; 2,5; 4; 6,3 МПа.
У дифманометров-расходомеров верхние пределы измерений выбираются из ряда, определяемого выражением:
А = а × 10n, (2.7)
где а – одно из чисел следующего ряда: 1; 1,25; 1,6; 2,0; 2,5; 3,2; 4; 5; 6,3; 8; n – целое (положительное или отрицательное) число или нуль.
Верхние пределы измерений или сумма абсолютных значений верхних пределов измерений дифманометров-уровнемеров следует выбирать и ряда:
0,25; 0,4; 0,63; 1,0; 1,6; 2,5; 4,0; 6,3; 10; 16; 25; 40; 63; 100 и 160 метров.
Одной из важных характеристик дифманометров является предельно допустимое рабочее избыточное давление, т. е. избыточное давление, которое могут выдержать рабочие каналы без необратимой деформации чувствительных элементов. Такое значение параметра принимается из следующего ряда:
25; 40; 63; 100; 160; 250; 400 и 630 кПа;
1; 1,6; 2,5; 4; 6,3; 10; 16; 25; 32; 40 и 63 МПа.
Нижние пределы измерений дифманометров-расходо-меров из-за неустойчивости работы стандартных сужающих устройств при малых Числах Рейнольдса измеряемого потока не должны превышать 30 % шкалы прибора. У преобразователей Annubar этот предел не превышает 10 % при сохранении объявленного класса точности (1,0).
Классы точности дифманометров принимаются из ряда: 0,25; 0,5; 1,0; 1,5.
Дифманометры должны иметь линейную шкалу при измерении уровня или перепада, линейную или квадратичную – при измерении расхода.
Дифманометры могут иметь условные обозначения, предложенные в методике п.1.4. Указываются модель прибора, причем на первом месте в обозначении фиксируется измеряемый параметр – тип измерителя (дифманометр), затем – принцип измерения и функция, предельный номинальный перепад, избыточное рабочее давление, класс точности. Например, дифманометр сильфонный показывающий в корпусе диаметром 160 мм, на предельный номинальный перепад давления 630 кПа, с рабочим избыточным давлением 32 МПа, класса точности 1,5 обозначается как
ДСП 160 (0…630 кПа)-32 МПа-1,5.
После этого допускается указывать дополнительные обозначения, например исполнение по «IP», измеряемой среде, присоединительным линиям и т. д.
Специфика измерения дифференциального давления обусловливает наличие в дифманометрах устройств продувки импульсных линий без необходимости демонтажа прибора или его узлов.
При испытаниях, а также в нормальных условиях отечественные дифманометры, согласно требований производителя, должны обеспечивать заданные метрологические характеристики после выдержки не менее 6-ти часов при температуре окружающей среды:
20 ± 2 или 23 ± 2 оС – для приборов классов точности 0,5; 0,6 и 1;
20 ± 5 или 23 ± 5 оС – для приборов класса точности 1,5.
Современные конструкции из-за снижения металлоемкости и совершенствования преобразователей позволяют сокращать время температурной адаптации у некоторых моделей до нескольких десятков минут.
Конкретная температура приведена в ТУ на измеритель и должна регистрироваться в техническом описании или паспорте на прибор.
Дифманометры, не защищенные от одностороннего воздействия, должны выдерживать перегрузку со стороны среды «плюсового» давления, превышающую предельные номинальные перепады на 10…50 %. «Плюсовым», в противовес «минусовому», называют большее из двух давлений среды, поступающей на вход дифференциального манометра.
Конструкции, у которых предусмотрены односторонние перегрузки, должны выдерживать десятикратные, стократные или двухсот пятидесятикратные односторонние перегрузки/23/.
Показывающие дифференциальные манометры на основе трубчатой пружины находят широкое применение для визуализации расхода различных сред, гидродинамических потерь в системах теплового отопления.
Дифференциальное давление, т. е. разность давлений р отсчитывается стрелкой на шкале циферблата.
Дифманометры такого типа, исходя из особенностей трубчатых пружин, обеспечивают работоспособность в промышленных условиях в диапазоне от 0 до 100 МПа.[ http://jumas.ru/index.php?area=1&p=static&page=razdel2_2_4]
Тематики
Синонимы
EN
- differential gauge pressure
- differential manometer
- differential pressure gage
- differential pressure indicator
- differential-pressure gage
DE
FR
Русско-французский словарь нормативно-технической терминологии > дифференциальный манометр
18 программируемый логический контроллер
- speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-немецкий словарь нормативно-технической терминологии > программируемый логический контроллер
19 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
20 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-французский словарь нормативно-технической терминологии > программируемый логический контроллер
Страницы- 1
- 2
См. также в других словарях:
ГОСТ Р МЭК 62127-1-2009: Государственная система обеспечения единства измерений. Параметры полей ультразвуковых. Общие требования к методам измерений и способам описания полей в частотном диапазоне от 0,5 до 40 МГц — Терминология ГОСТ Р МЭК 62127 1 2009: Государственная система обеспечения единства измерений. Параметры полей ультразвуковых. Общие требования к методам измерений и способам описания полей в частотном диапазоне от 0,5 до 40 МГц оригинал документа … Словарь-справочник терминов нормативно-технической документации
ГОСТ Р МЭК 62127-2-2009: Государственная система обеспечения единства измерений. Гидрофоны. Общие требования к методикам калибровки в частотном диапазоне до 40 МГц — Терминология ГОСТ Р МЭК 62127 2 2009: Государственная система обеспечения единства измерений. Гидрофоны. Общие требования к методикам калибровки в частотном диапазоне до 40 МГц оригинал документа: 3.1 акустический центр: Точка на преобразователе… … Словарь-справочник терминов нормативно-технической документации
Измерения в мно гомодовом режиме радиоколебаний радиопередатчика, согласованного с нагрузкой во всем диапазоне частот — 7.5 Измерения в мно гомодовом режиме радиоколебаний радиопередатчика, согласованного с нагрузкой во всем диапазоне частот 7.5.1 Структурная схема измерений приведена на рисунке 4. 7.5.2 Проводят калибровку по 7.2 и проверку достаточности… … Словарь-справочник терминов нормативно-технической документации
Методика СИСПР измерения помех в диапазоне 0,15 - 30 МГц — 4.2. Методика СИСПР измерения помех в диапазоне 0,15 30 МГц 4.2.1. Частоты измерения Базисная частота измерений 0,5 МГц. Рекомендуется производить измерения на частоте 0,5 МГц ± 10 %, допускается использовать другие частоты, например, 1 МГц.… … Словарь-справочник терминов нормативно-технической документации
РАСПРОСТРАНЕНИЕ РАДИОВОЛН — процесс передачи эл. магн. колебаний радиодиапазона (см. РАДИОВОЛНЫ) в пространстве от одного места к другому, в частности от передатчика к приёмнику. В естеств. условиях Р. р. происходит в разл. средах, напр. в атмосфере, космической плазме, в… … Физическая энциклопедия
АЭРОДИНАМИКА — раздел механики сплошных сред, в котором изучаются закономерности движения воздуха и других газов, а также характеристики тел, движущихся в воздухе. К аэродинамическим характеристикам тел относятся подъемная сила и сила сопротивления и их… … Энциклопедия Кольера
НЕЛИНЕЙНАЯ ОПТИКА — раздел оптики, охватывающий исследования распространения мощных световых пучков в тв. телах, жидкостях и газах и их вз ствия с в вом. Сильное световое поле изменяет оптич. хар ки среды (показатель преломления, коэфф. поглощения), к рые становятся … Физическая энциклопедия
ВНЕАТМОСФЕРНАЯ АСТРОНОМИЯ — наблюдения астрономических объектов с помощью приборов, поднятых за пределы земной атмосферы на борту геофизических ракет или искусственных спутников. Ее основные разделы это астрономия высоких энергий (в рентгеновских и гамма лучах), оптическая… … Энциклопедия Кольера
СОЛНЦЕ. — СОЛНЦЕ. Содержание: 1. Введение 2. Внутреннее строение 3. Атмосфера 4. Магнитные поля 5. Излучение 1. Введение С. газовый, точнее плазменный, шар. Радиус С. см, т. е. в 109 раз больше экваториального радиуса Земли; масса С. г, т. е. в 333000 раз… … Физическая энциклопедия
ОНДУЛЯТОРНОЕ ИЗЛУЧЕНИЕ — электромагнитное излучение, испускаемое ускоренными заряж. ч цами в ондуляторах; излучение равномерно и прямолинейно движущегося осциллятора. Различные типы источников О. и., состоящих из ускорителя или накопителя ч ц (чаще эл нов) и ондулятора,… … Физическая энциклопедия
метод — метод: Метод косвенного измерения влажности веществ, основанный на зависимости диэлектрической проницаемости этих веществ от их влажности. Источник: РМГ 75 2004: Государственная система обеспечения еди … Словарь-справочник терминов нормативно-технической документации
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: с русского на все языки
со всех языков на русский- Со всех языков на:
- Русский
- С русского на:
- Все языки
- Английский
- Немецкий
- Французский